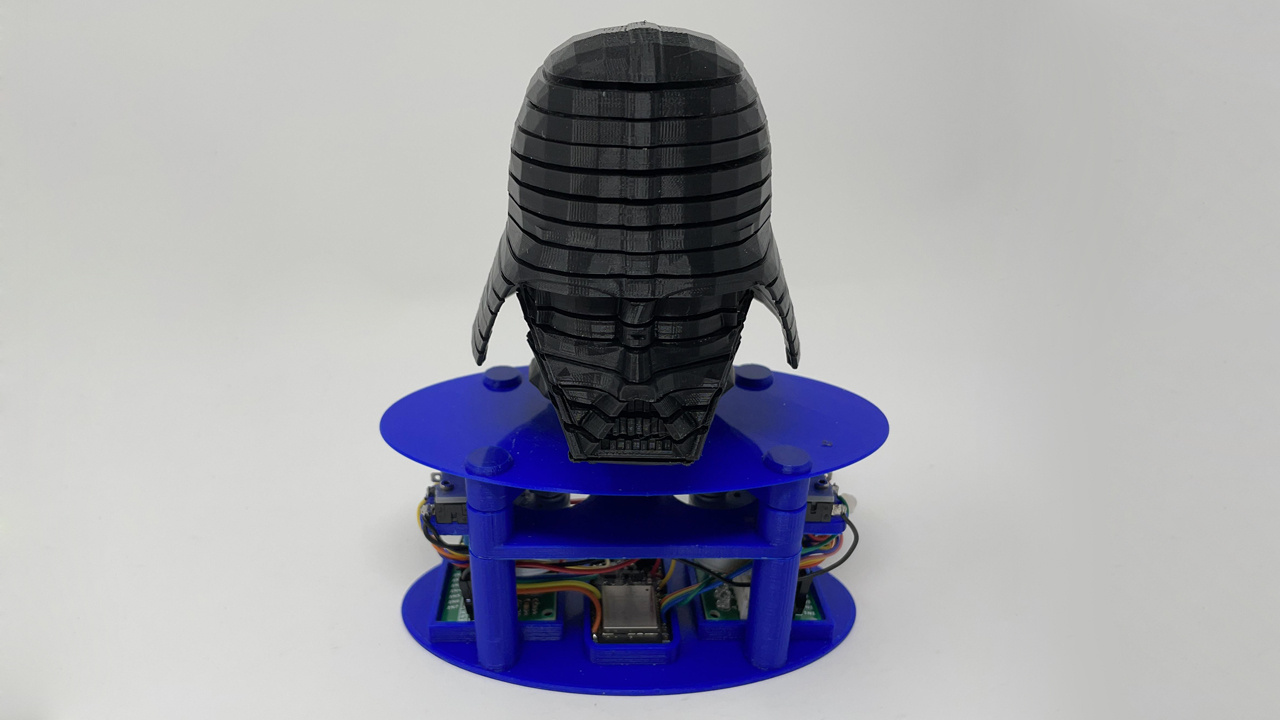
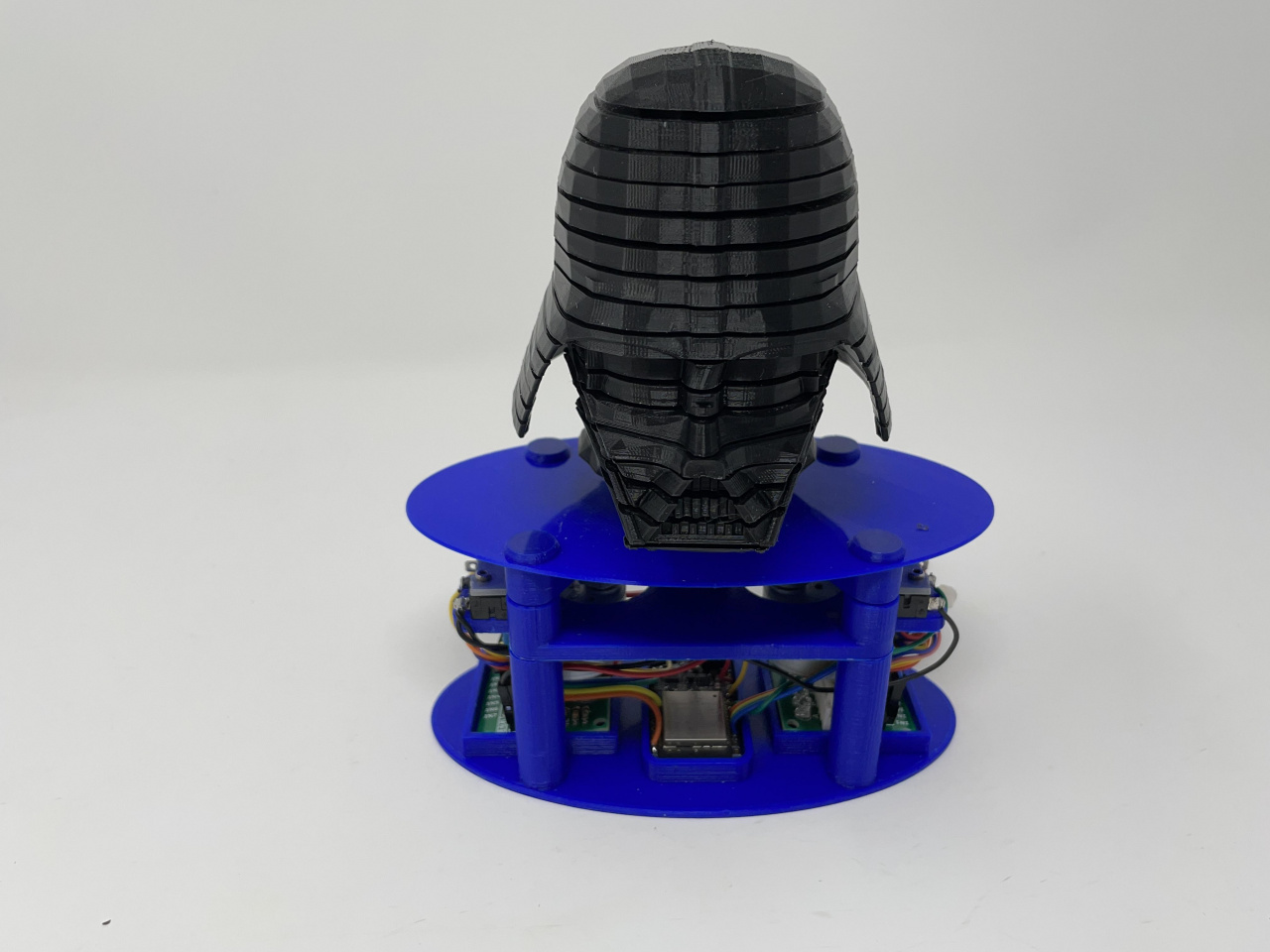
Данный подвижный шлем Дарта Вейдера напечатан на 3D-принтере и станет хорошим подарком для фанатов «Звездных войн»! Это версия 3.0, которая включает в себя ESP32, драйверы шаговых двигателей и шаговые двигатели, чтобы обеспечить более сложную и программируемую последовательность движения.
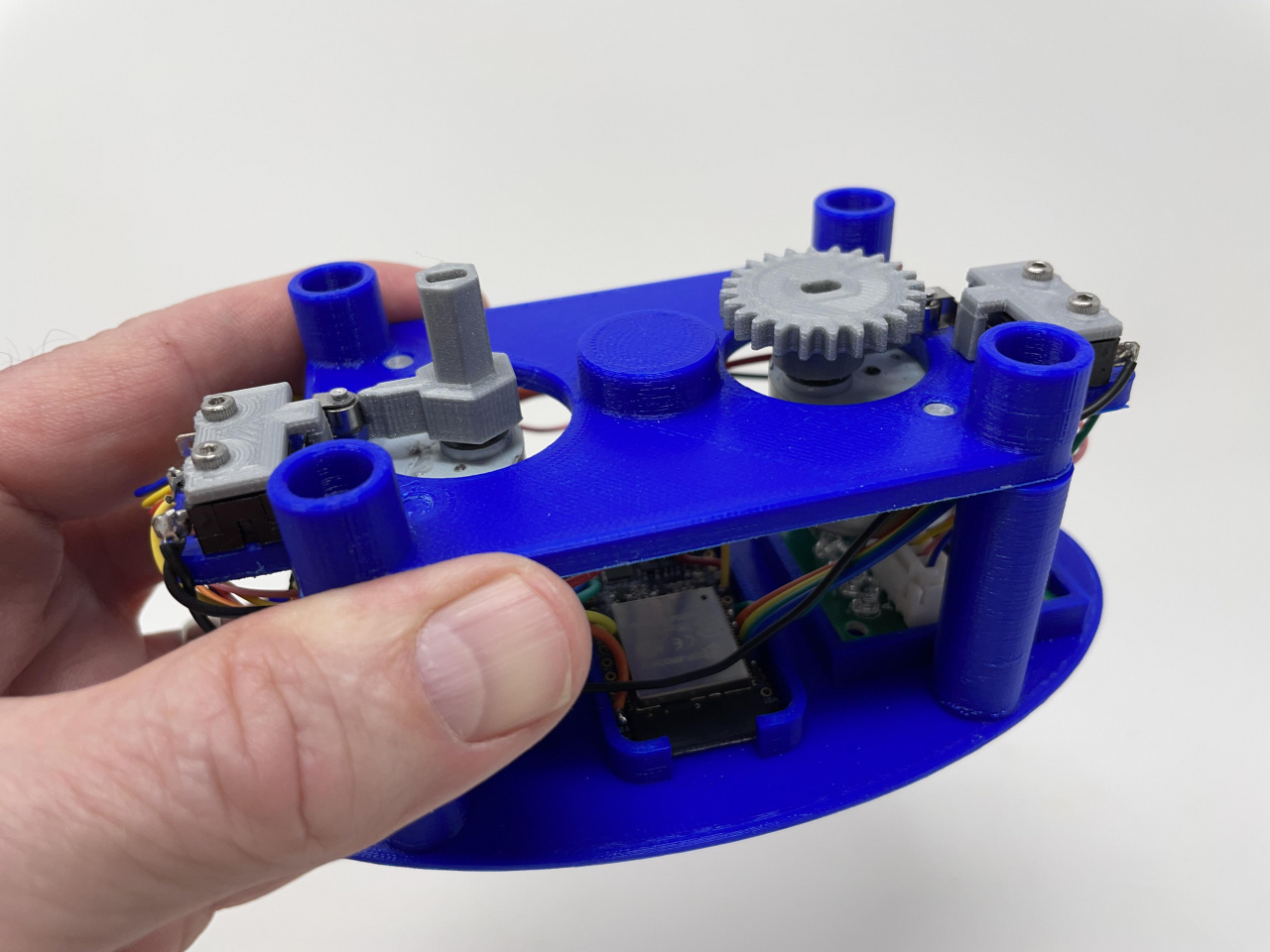
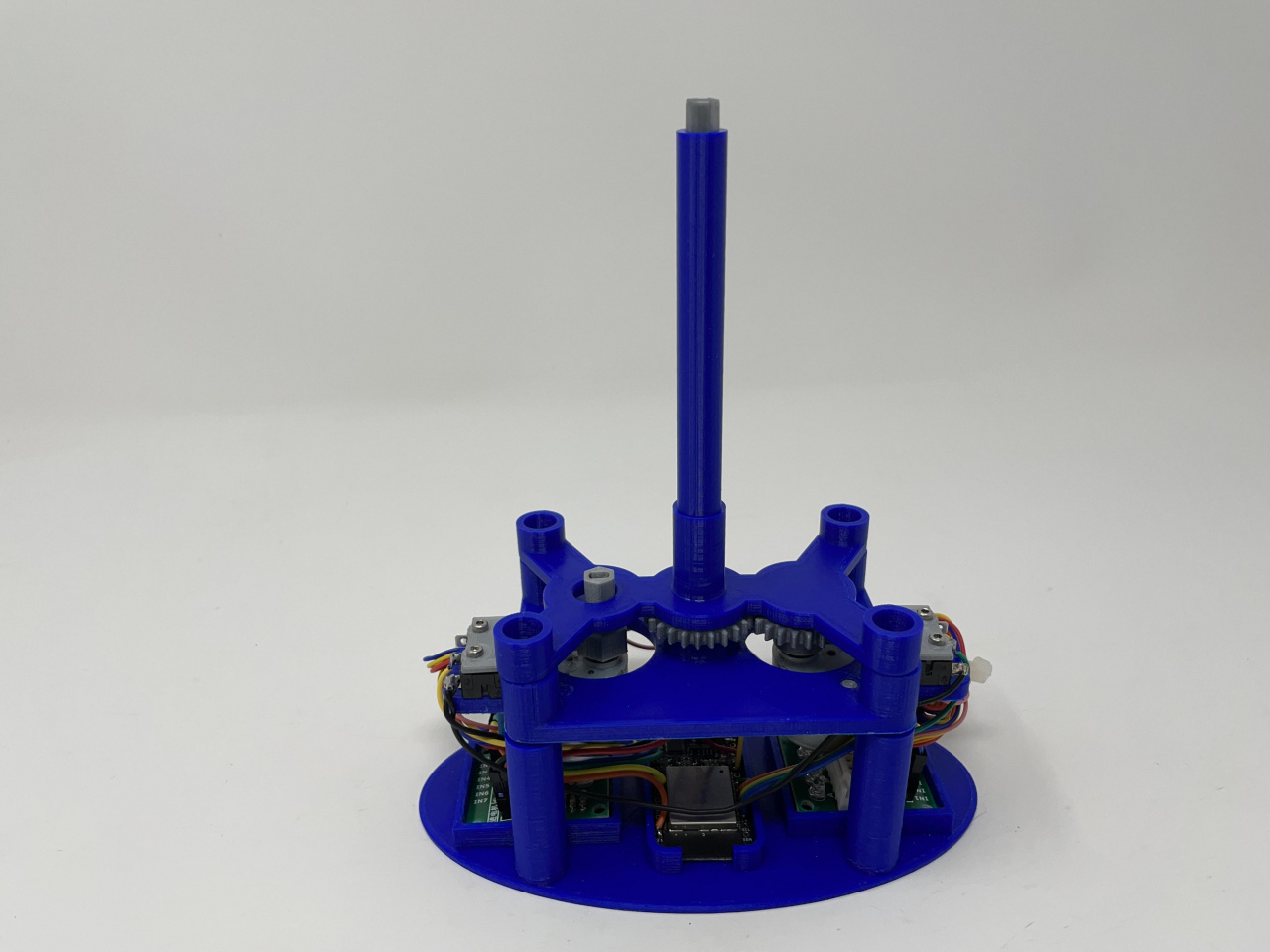
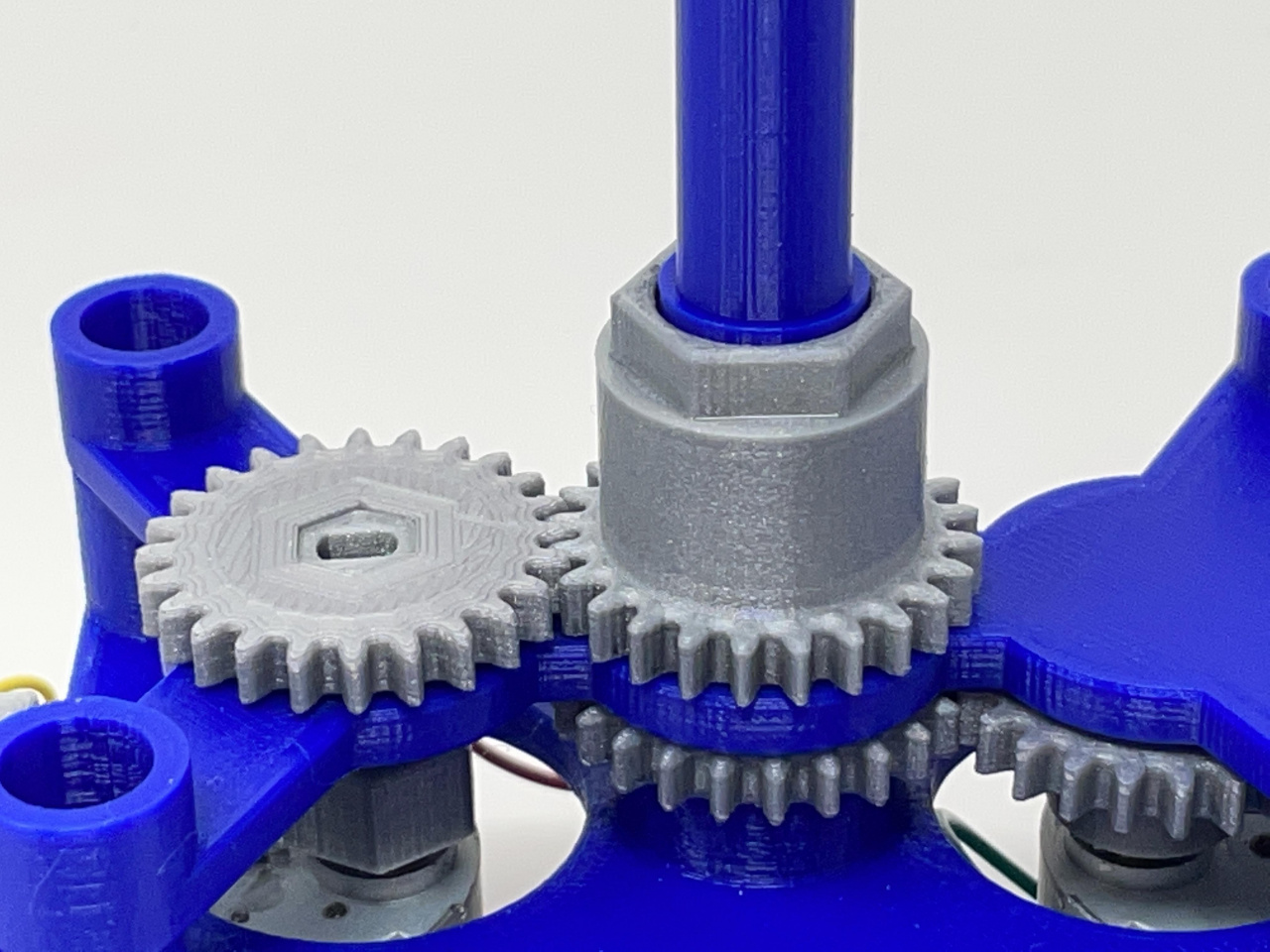
Как и в предыдущей версии шлема, единственным контактом между каждым срезом должны быть штыри в пазах, поэтому для успешного выполнения требуются тщательная 3D-печать (без деформаций) и сборка. Распечатайте 3D файлы и соберите эту модель.
Примечание: данная статья является переводом.
Материалы:
Я напечатал все детали на 3D-принтере с толщиной слоя 0,1 мм с заполнением 20%. Я напечатал на 3D-принтере 4 Bolt, 4mm.stl, 4 Bolt, Base.stl, 15 Spacer.stl и по одной каждой из оставшихся частей.
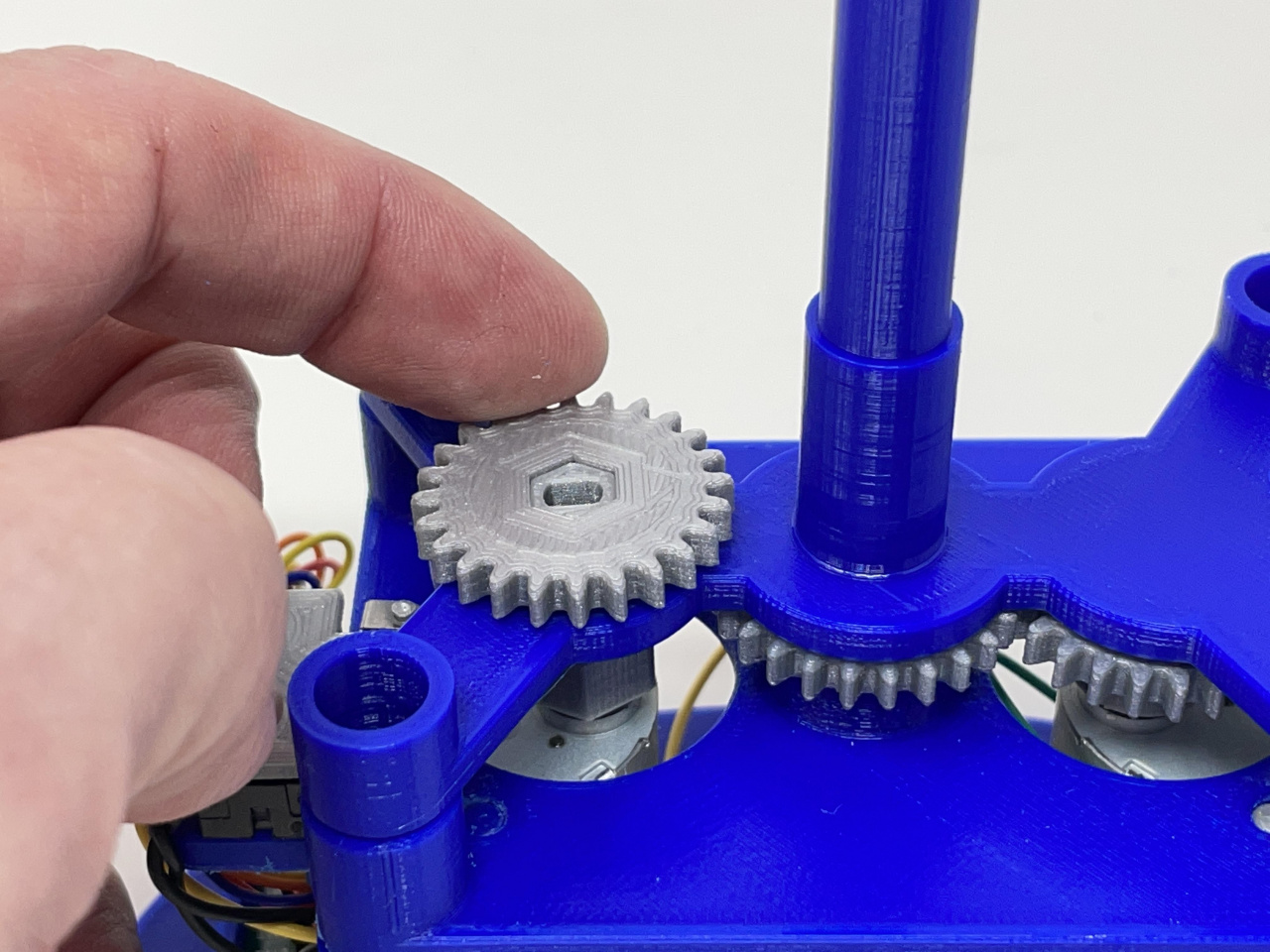
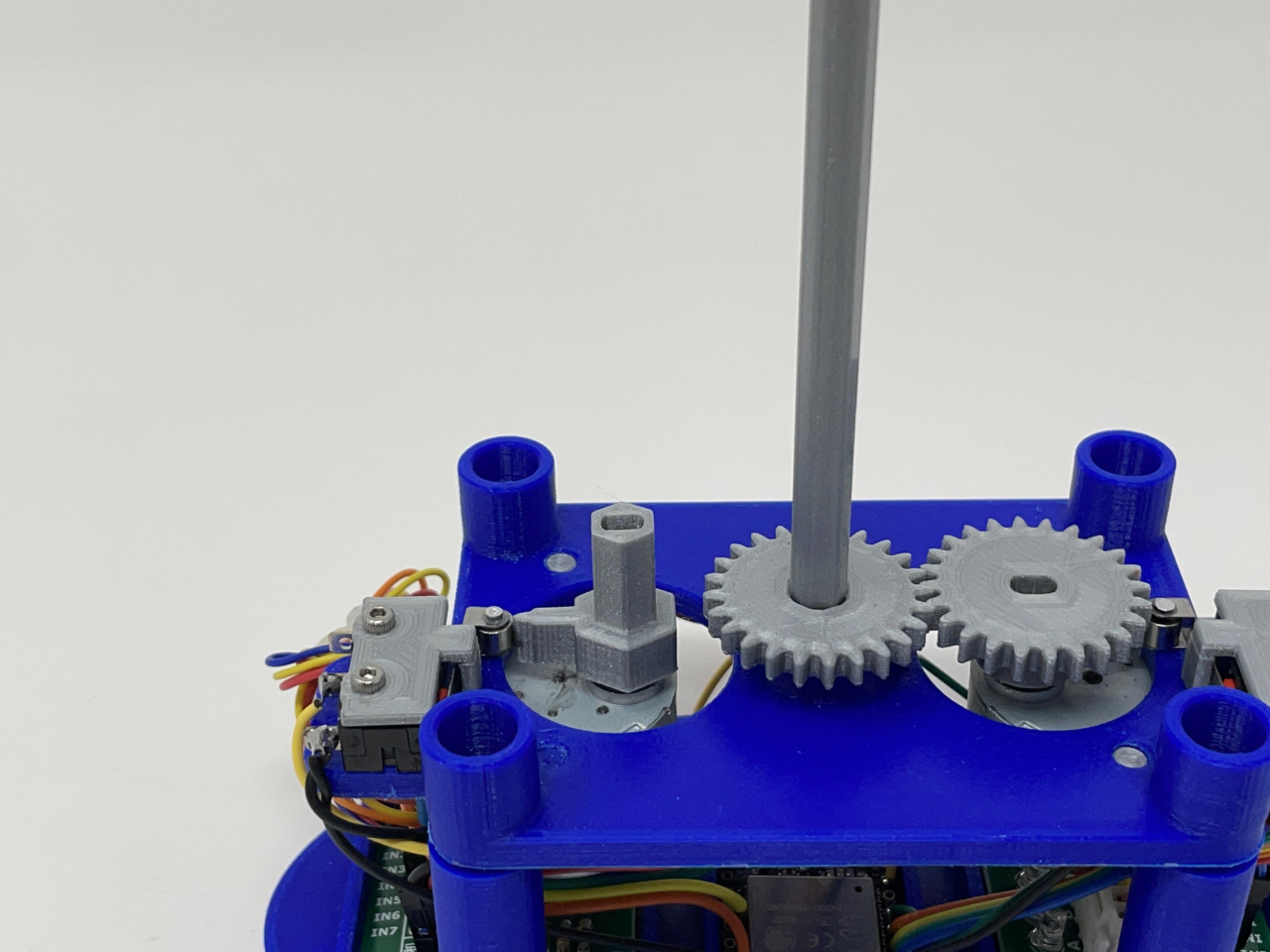
Этот механизм представляет собой высокоточную печать и сборку с использованием порой очень маленьких точных 3D-печатных деталей в ограниченном пространстве с высокоточным выравниванием. Я напечатал все детали с использованием Ultimaker Cura 4.8.0 "Engineering Profile" на моем Ultimaker S5s, что обеспечивает высокоточные допуски, требующие минимальной обрезки, обработки напильником, сверления или шлифовки. Тем не менее, перед сборкой я все равно провожу пробную подгонку, обрезаю, опиливаю, сверлю и шлифую все детали, что необходимо для плавного перемещения подвижных поверхностей и плотного прилегания неподвижных частей. В зависимости от вашего принтера, настроек принтера и выбранных вами цветов, для успешного воссоздания этой модели может потребоваться больше или меньше обрезки, опиливания, сверления и/или шлифовки. Я тщательно обработал напильником все края, которые соприкасались со строительной пластиной, чтобы убедиться в том, что все "наплывы" строительной пластины удалены и что все края гладкие, используя маленькие ювелирные пилочки и много терпения.
В этом механизме также используется резьбовая сборка, поэтому я использовал набор метчиков и штампов (4 мм на 1 и 8 мм на 1,25 мм) в соответствии с требованиями для очистки резьбы.
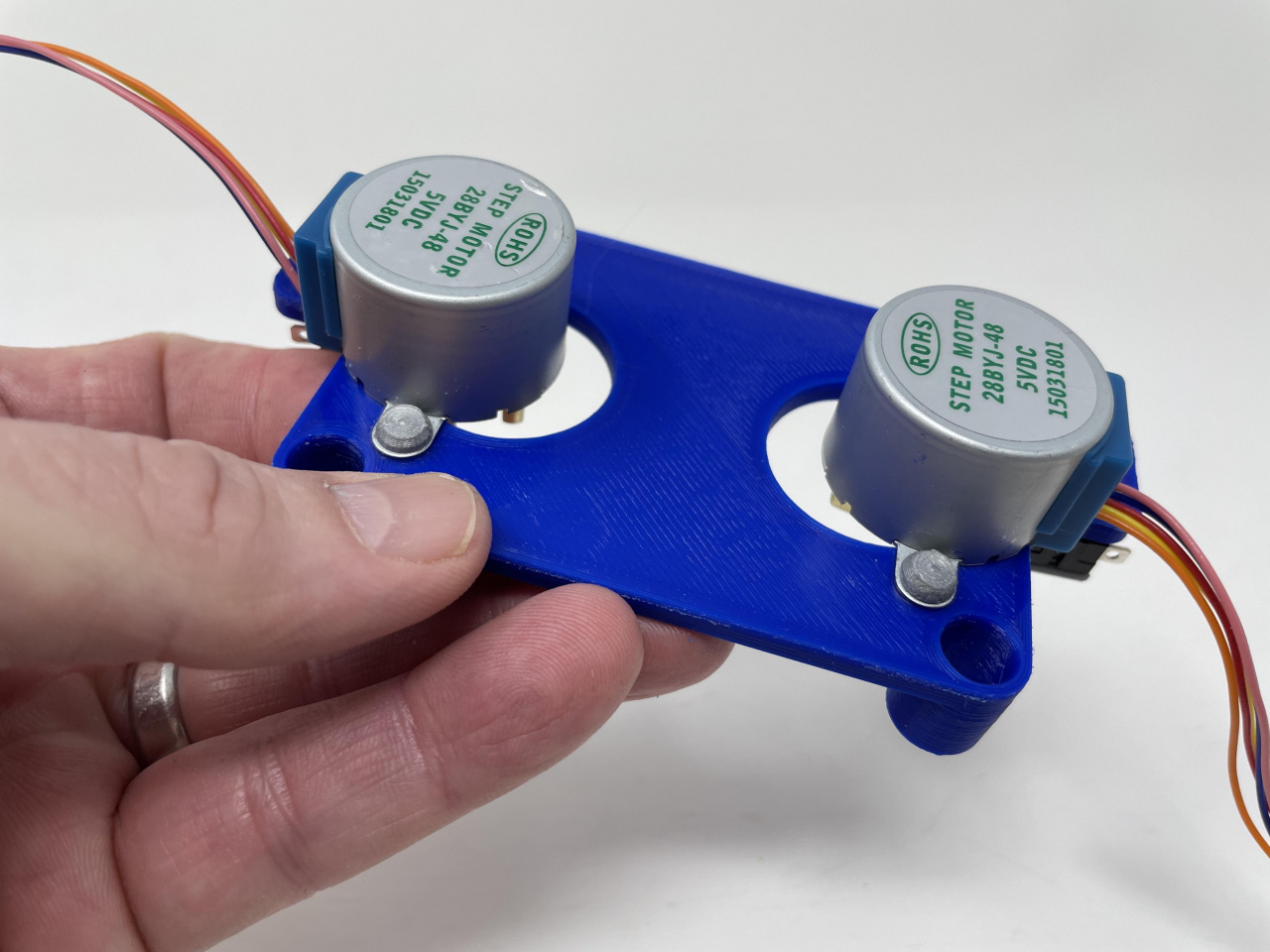

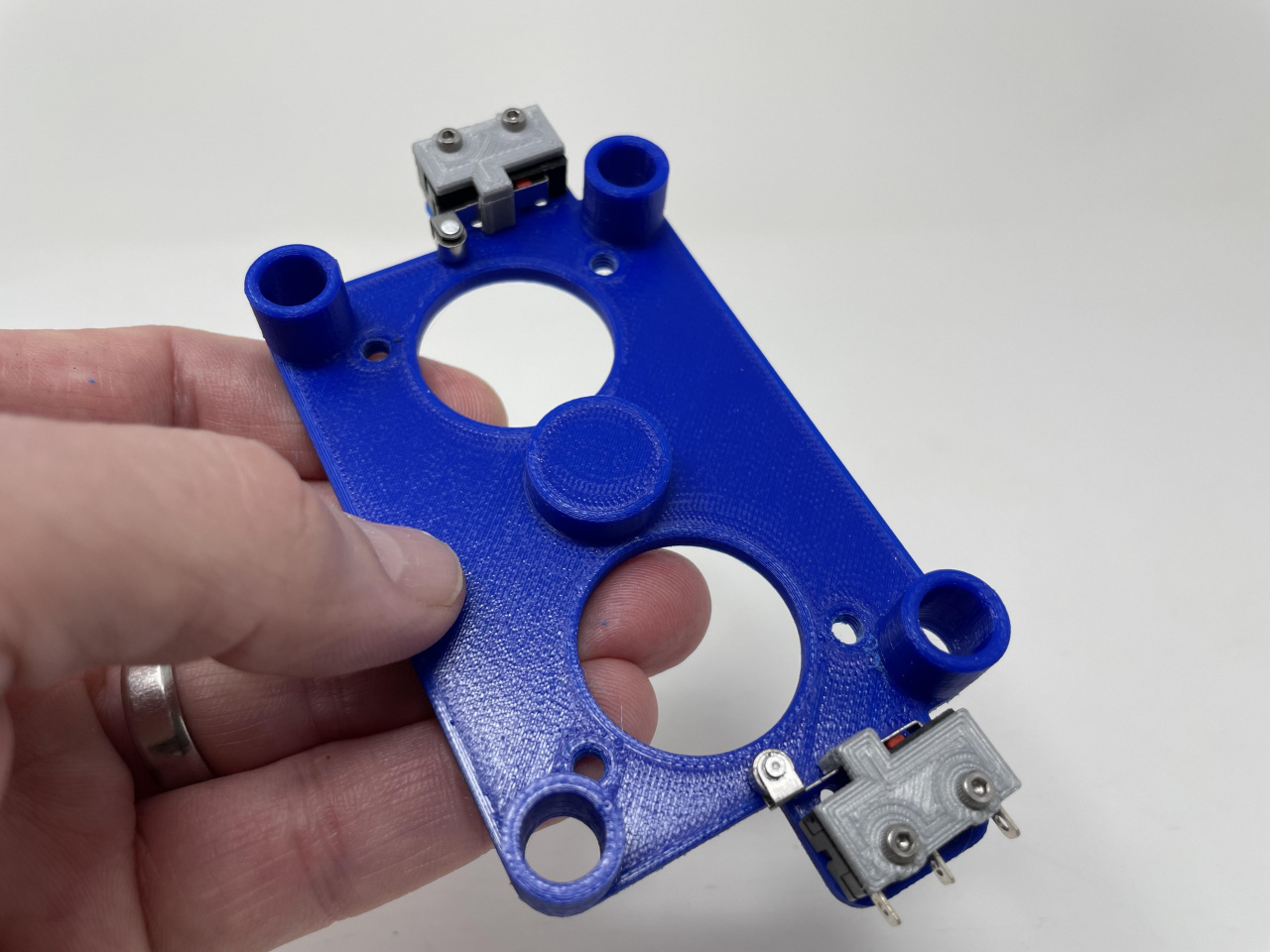

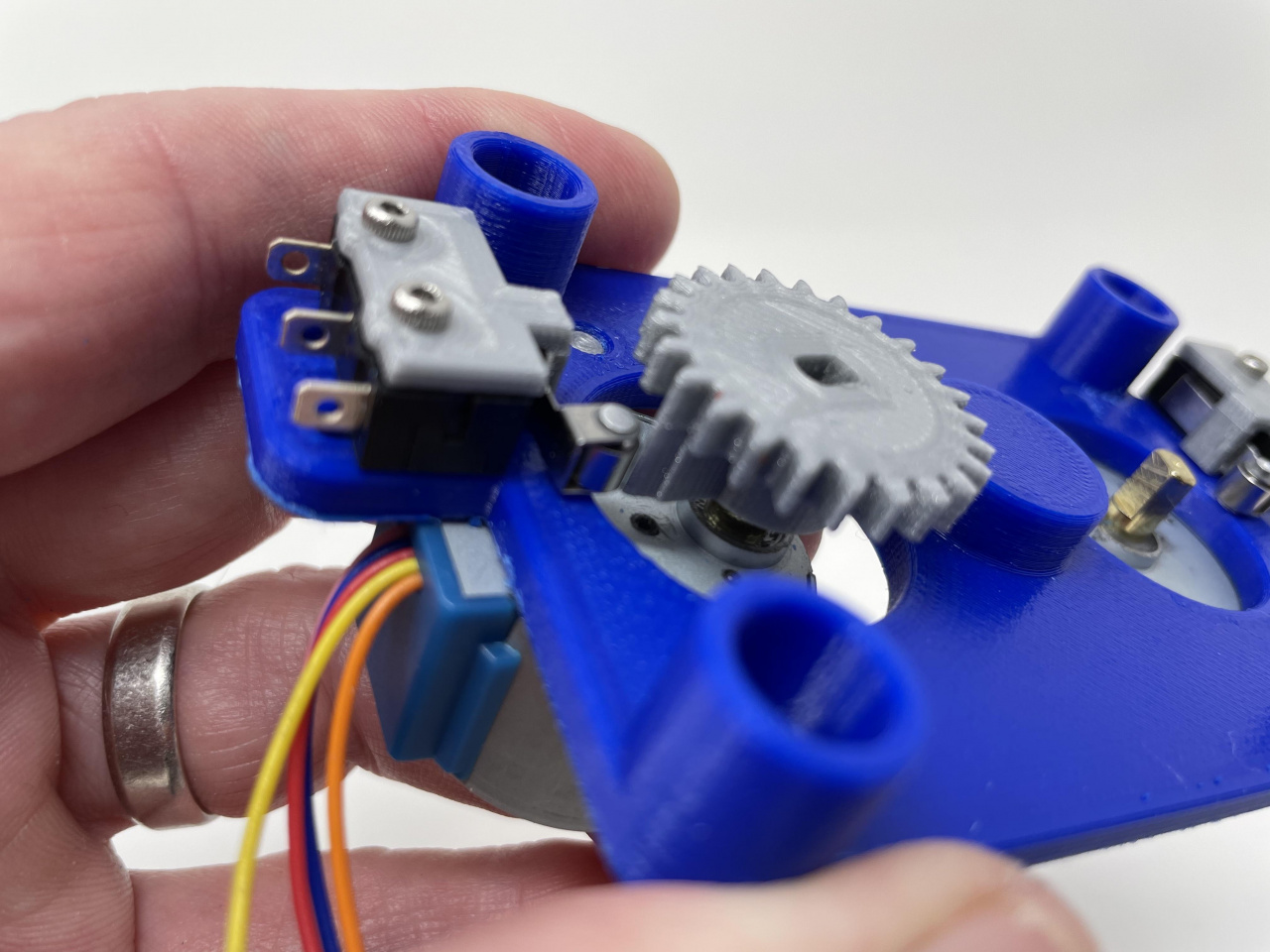
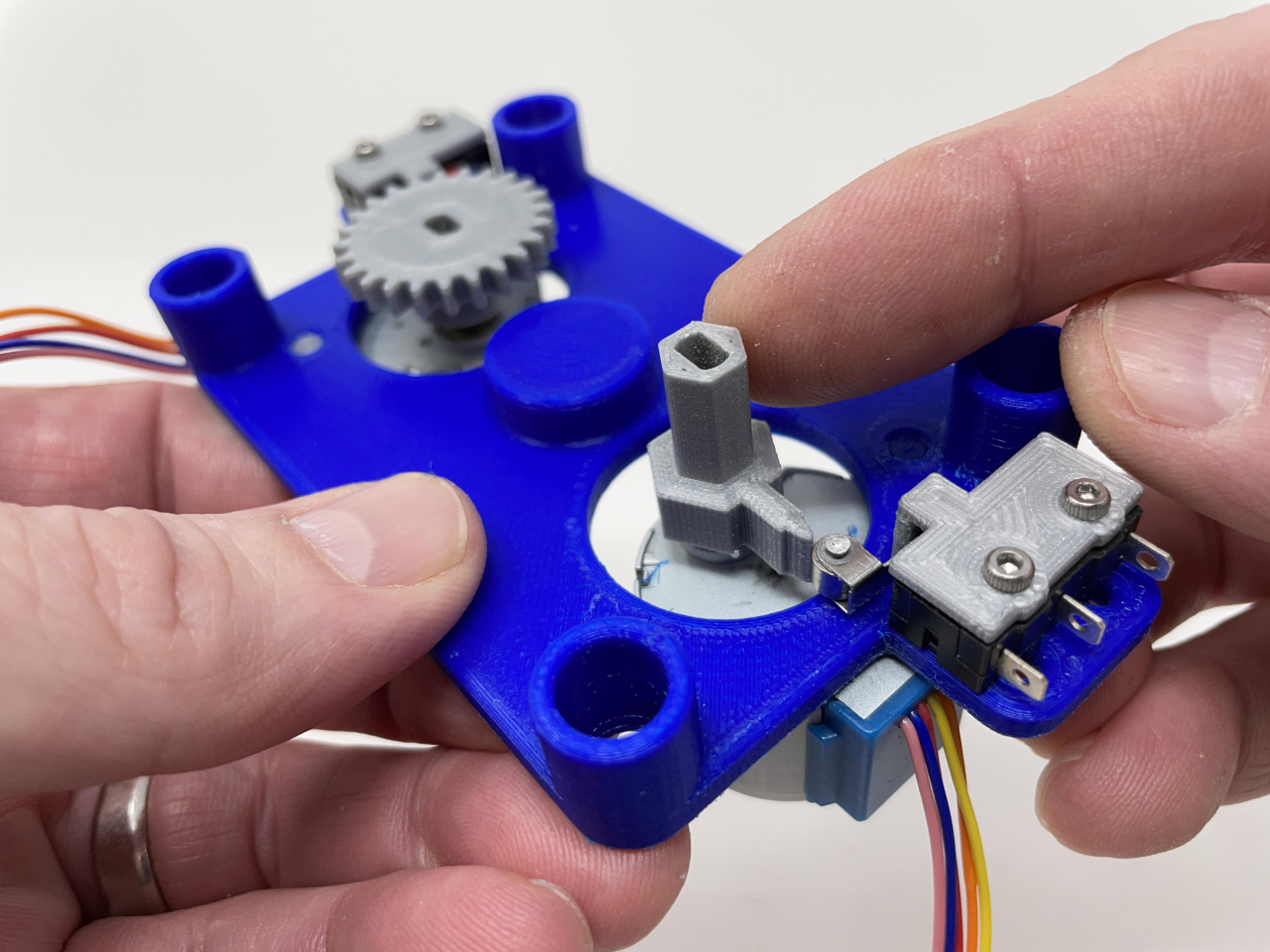
Чтобы собрать нижнюю пластину я выполнил следующие шаги:
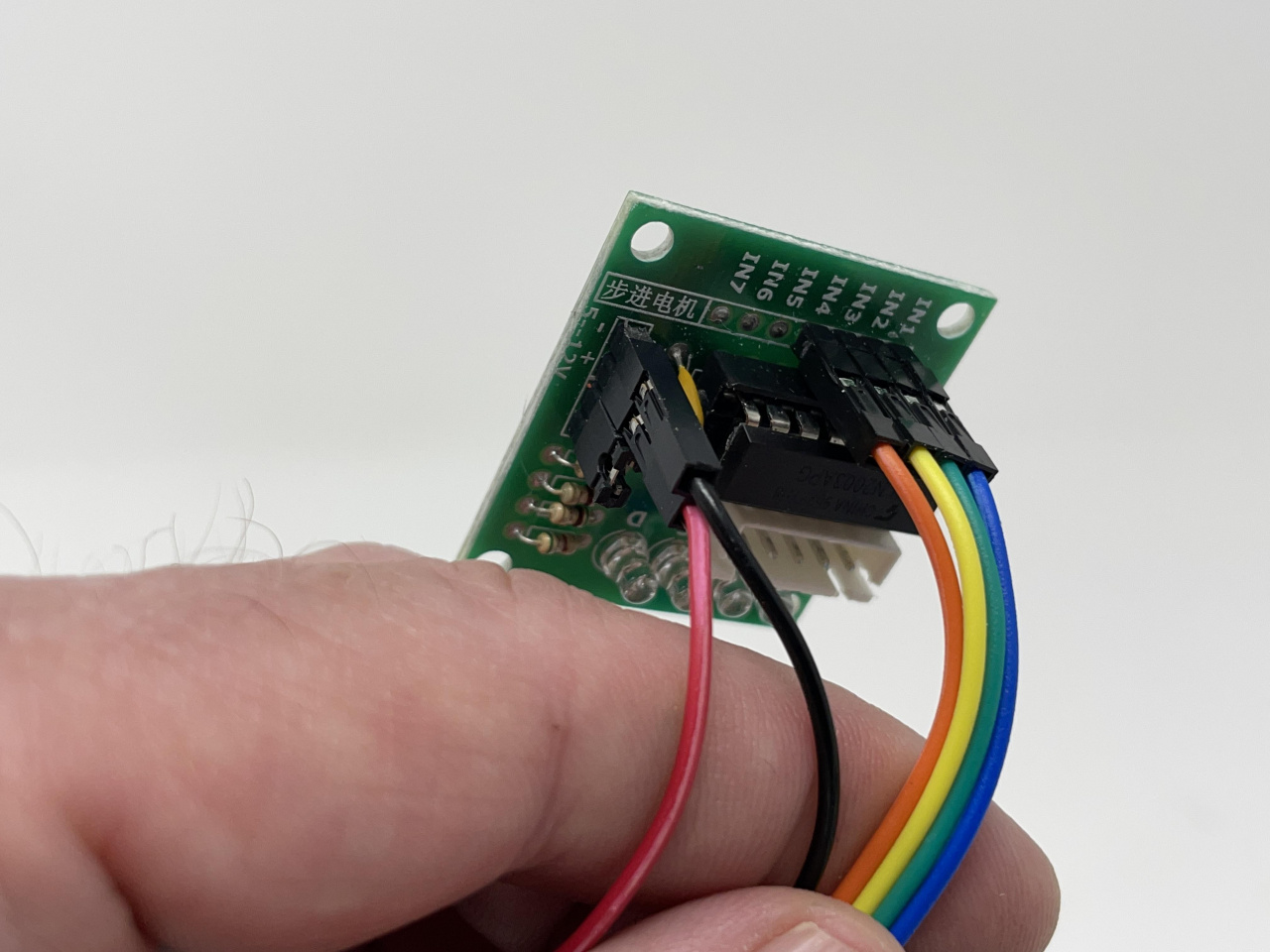

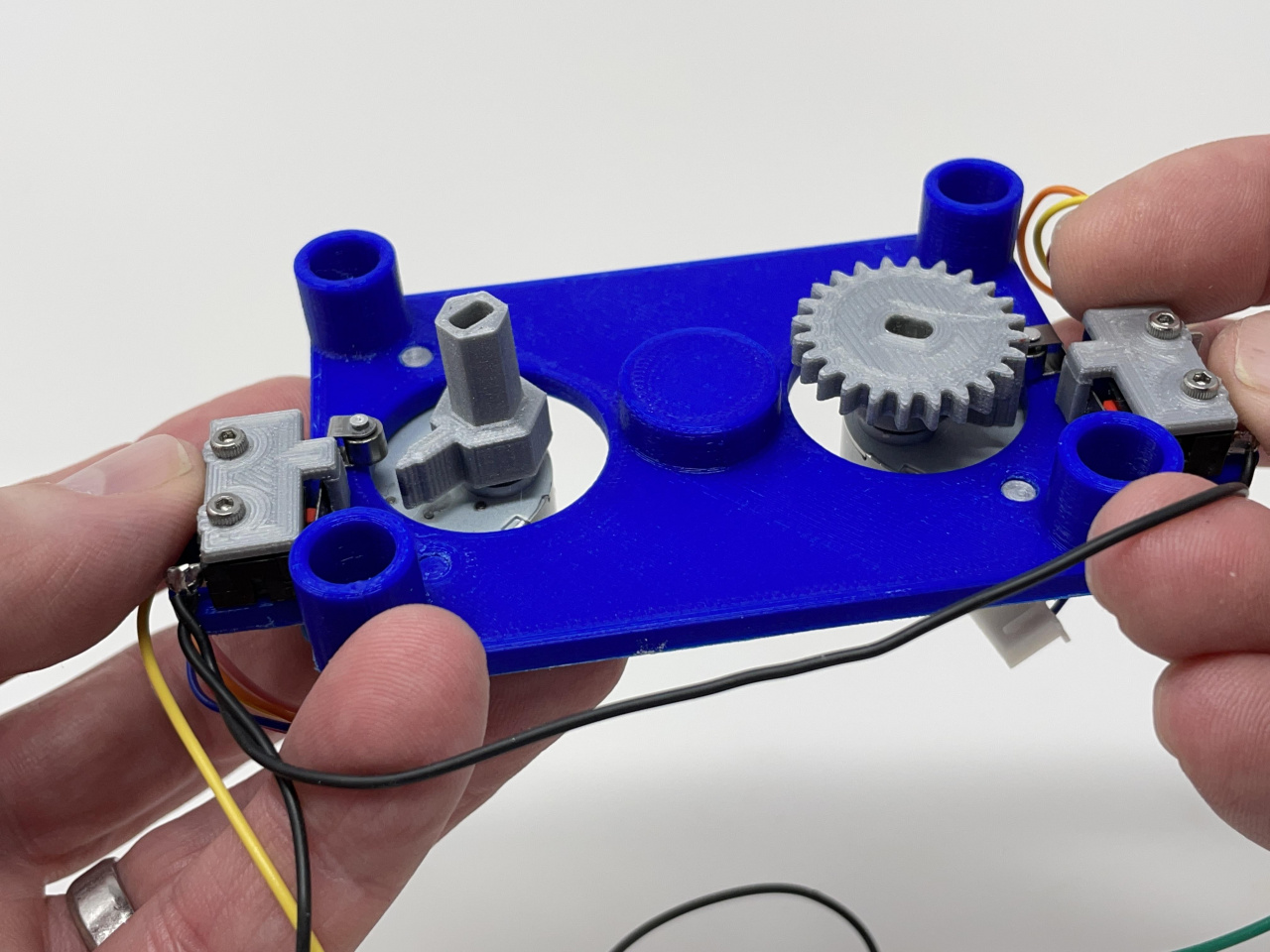
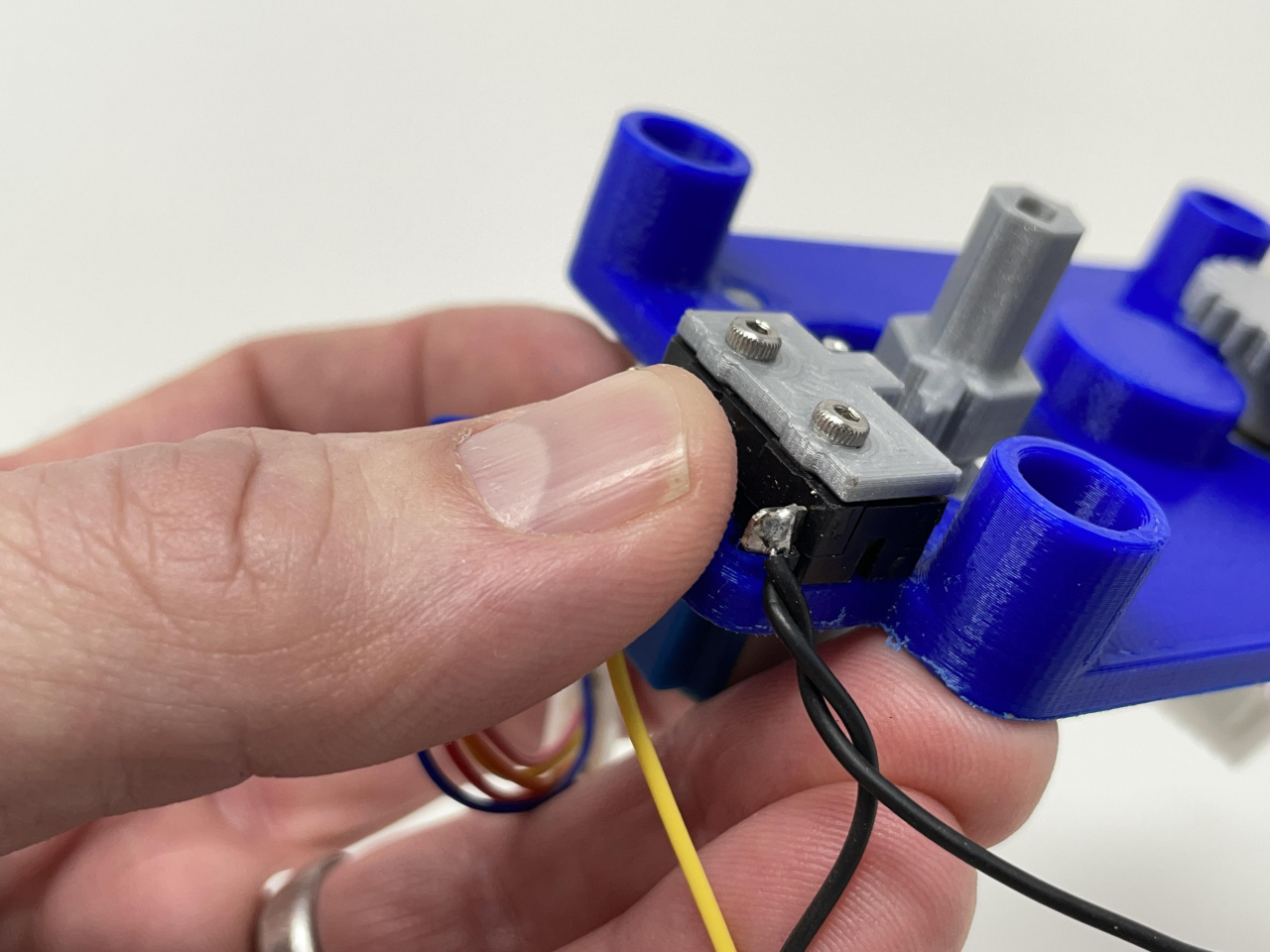
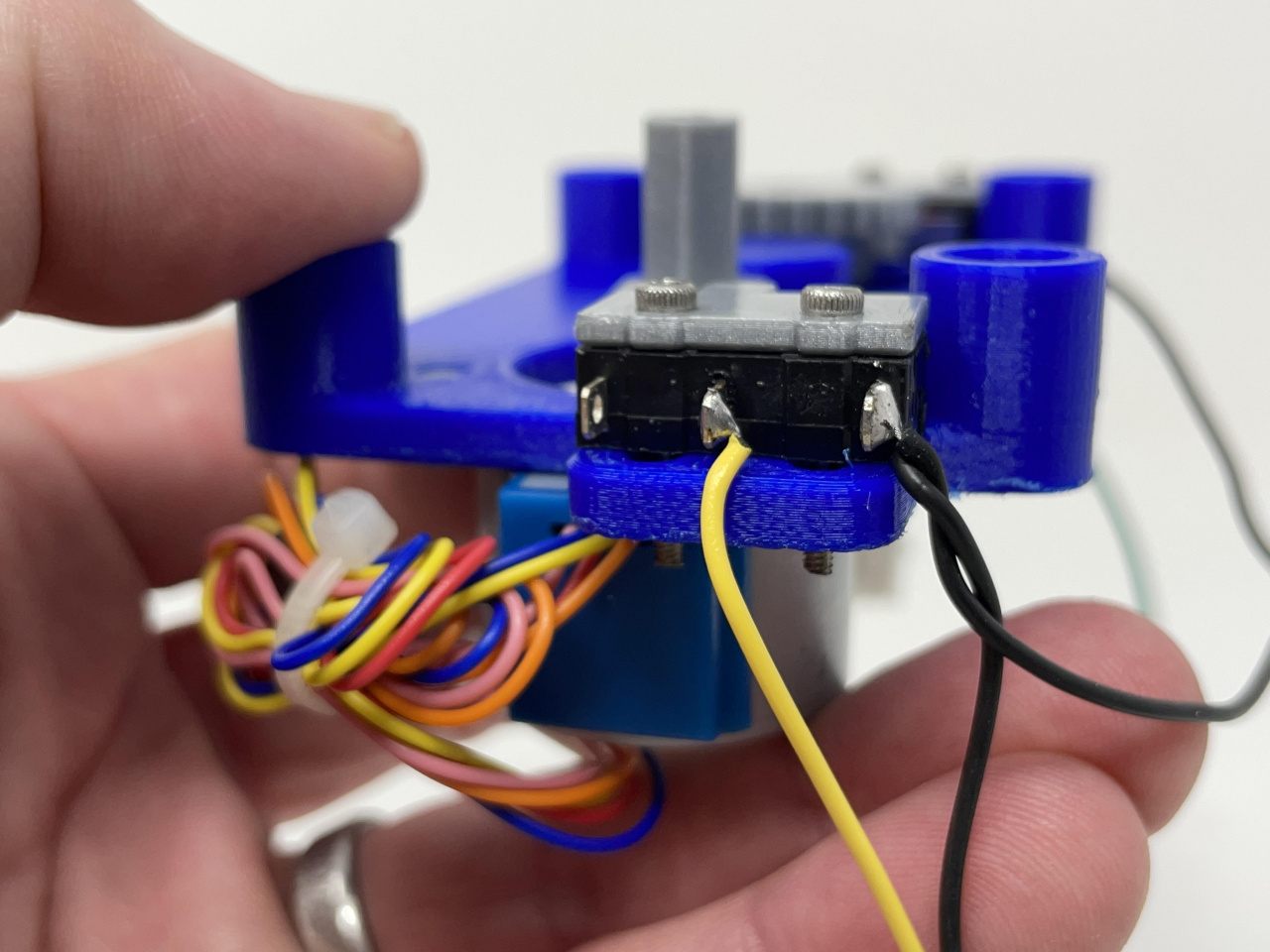
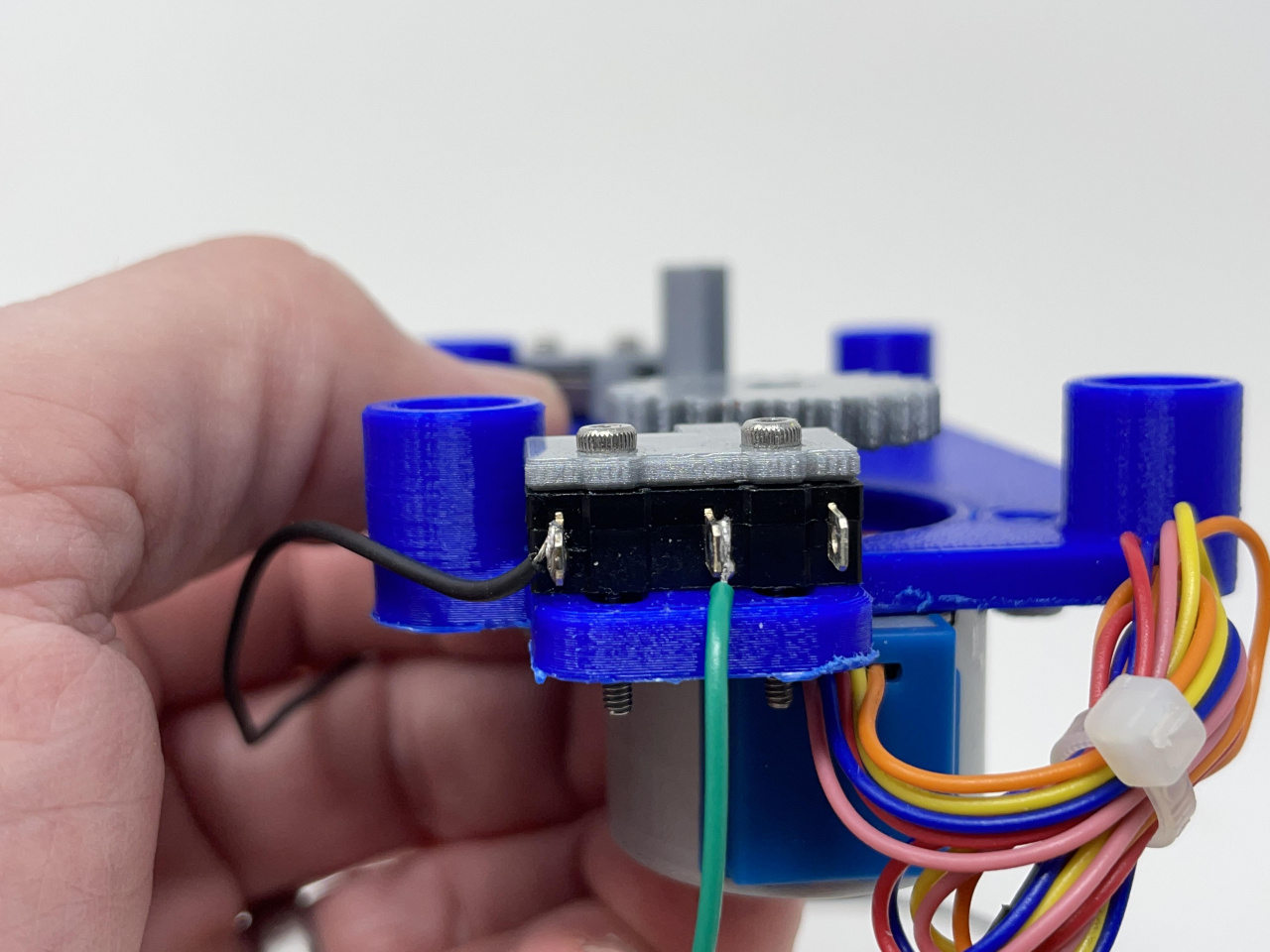

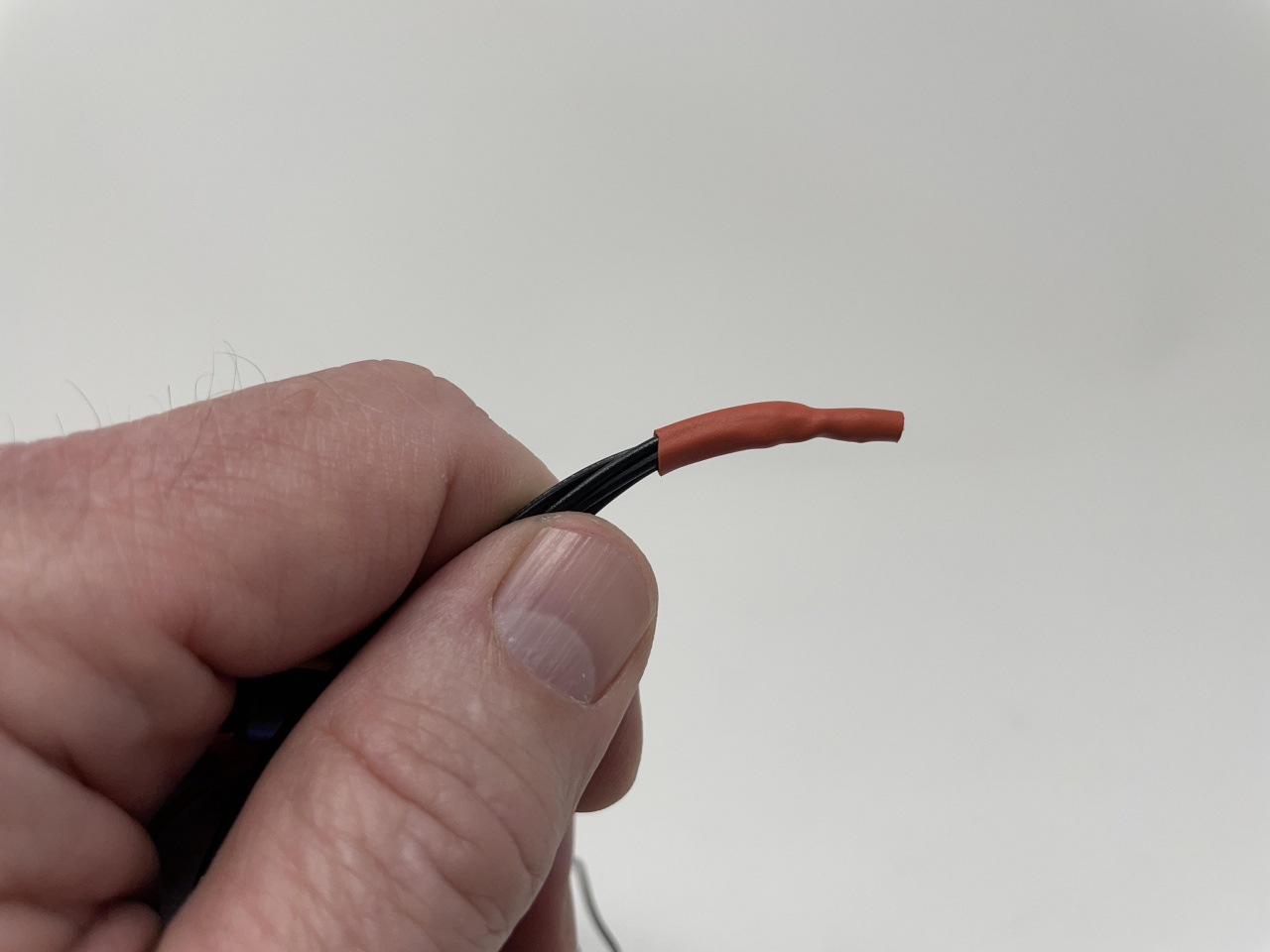
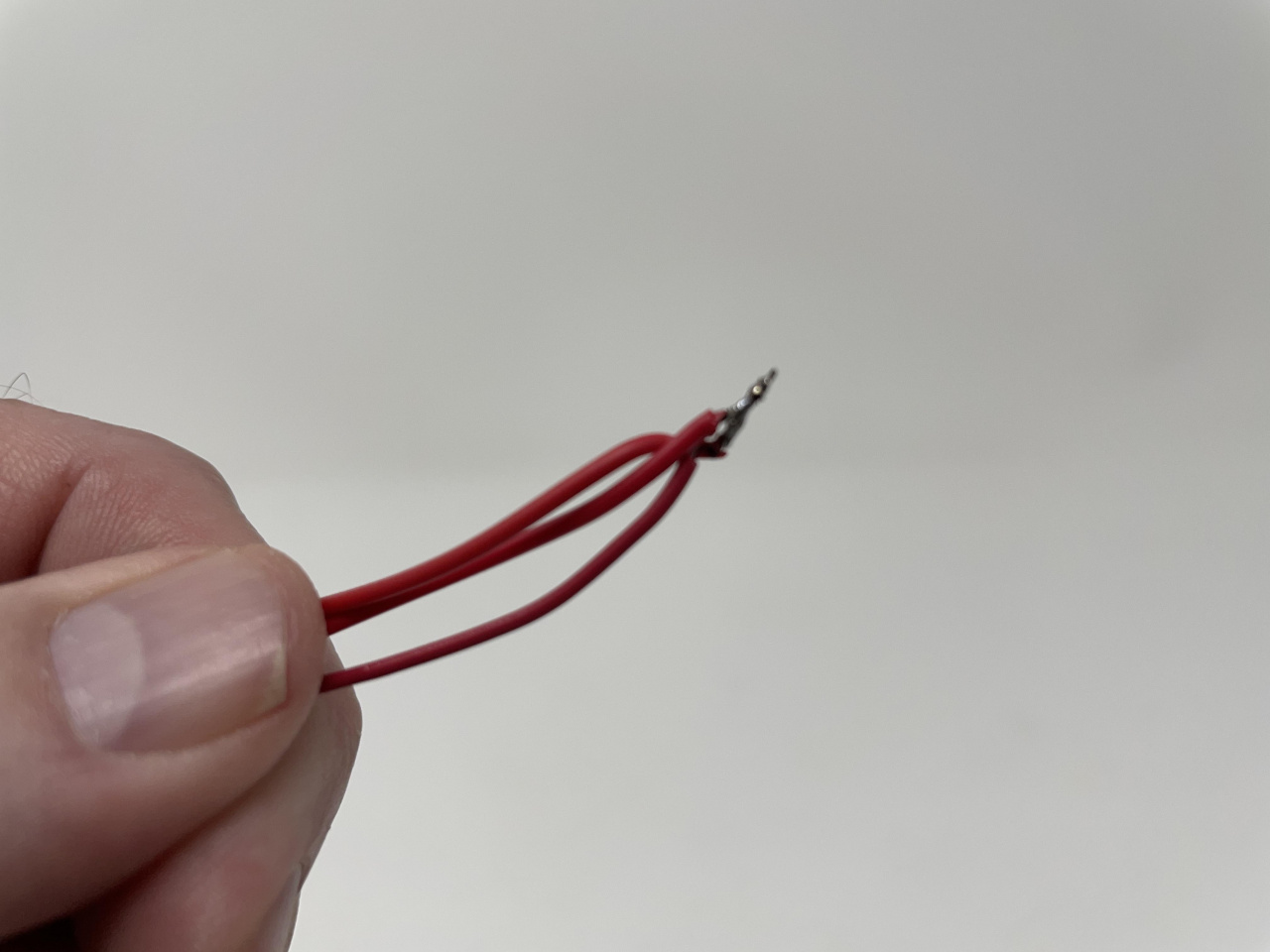
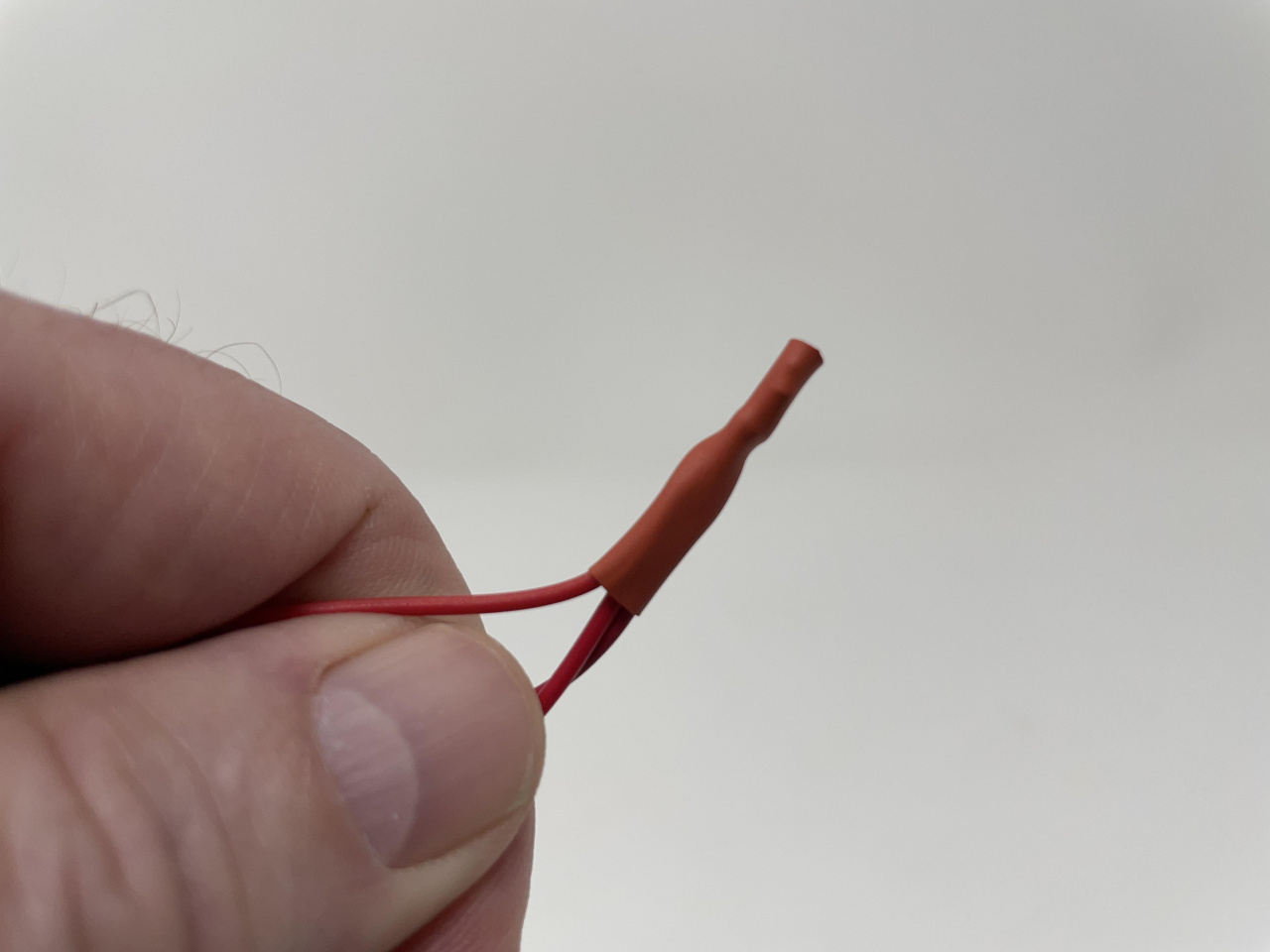
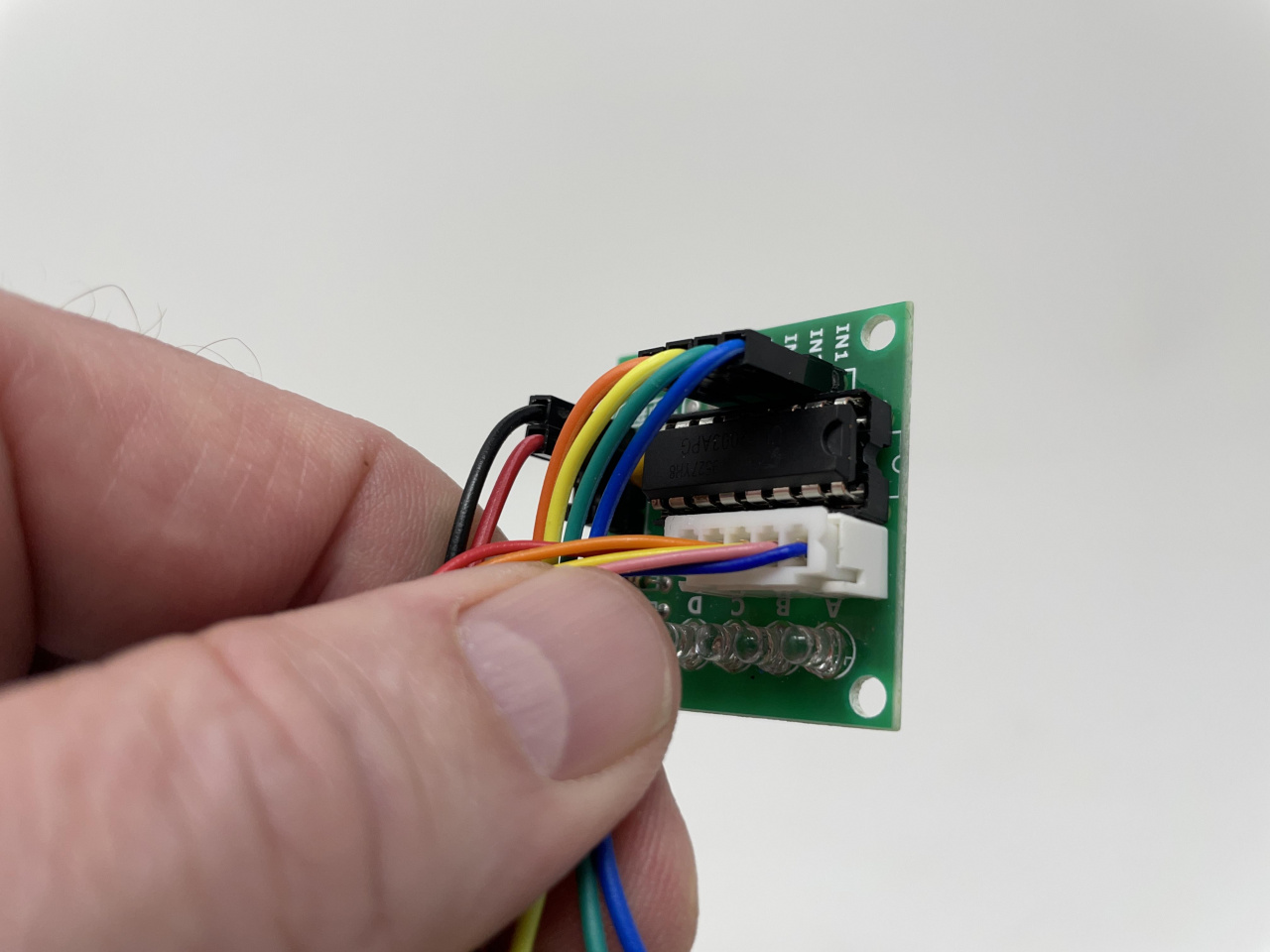
Из перемычек ленточного кабеля, входящих в комплект шагового двигателя, я создал два ленточных кабеля, каждый из которых имел синий, зеленый, желтый и оранжевый цвета, и отрезал разъемы-розетки от каждого кабеля так, чтобы провод длиной 70 мм был прикреплен к разъему-розетке.
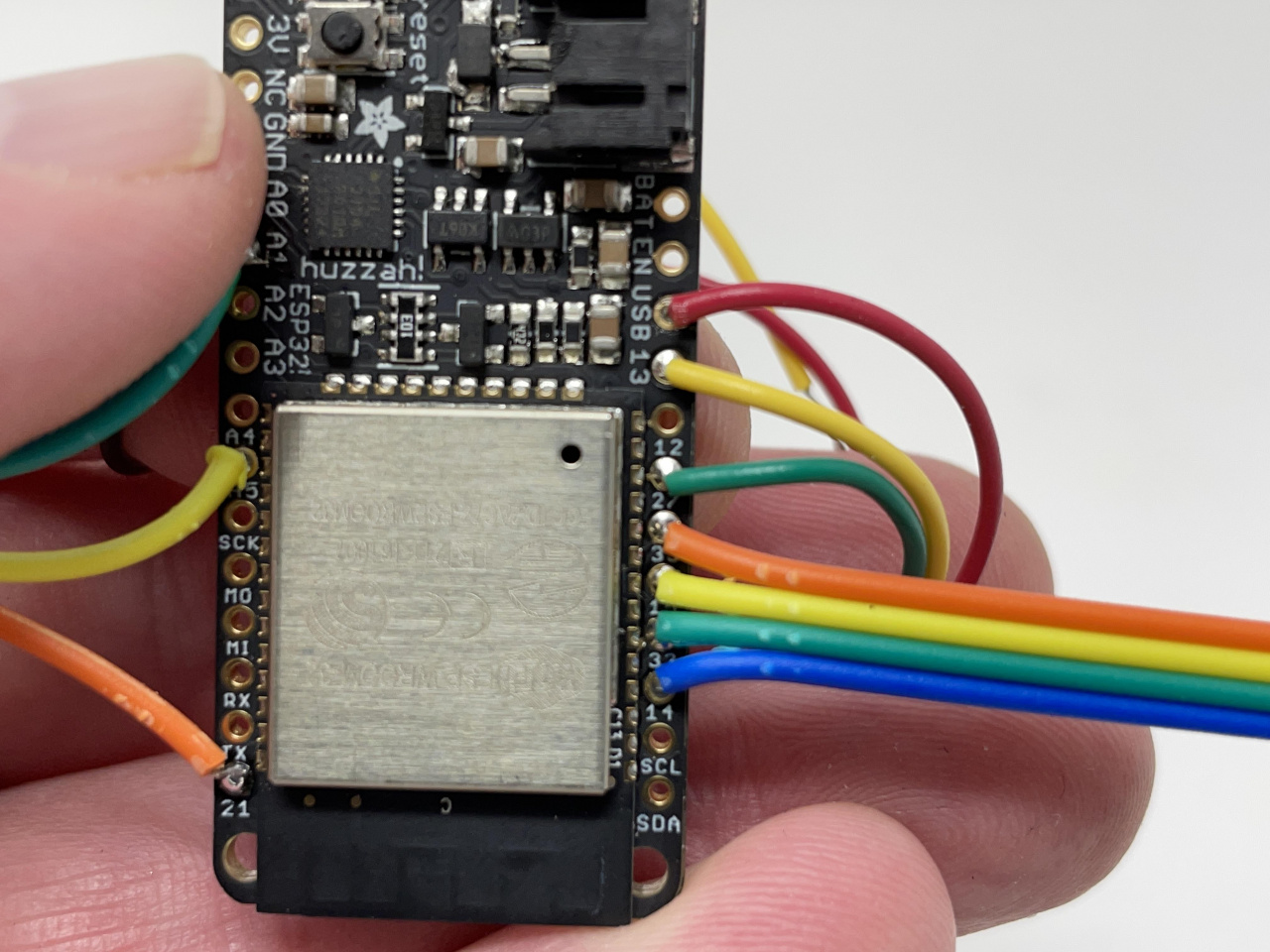
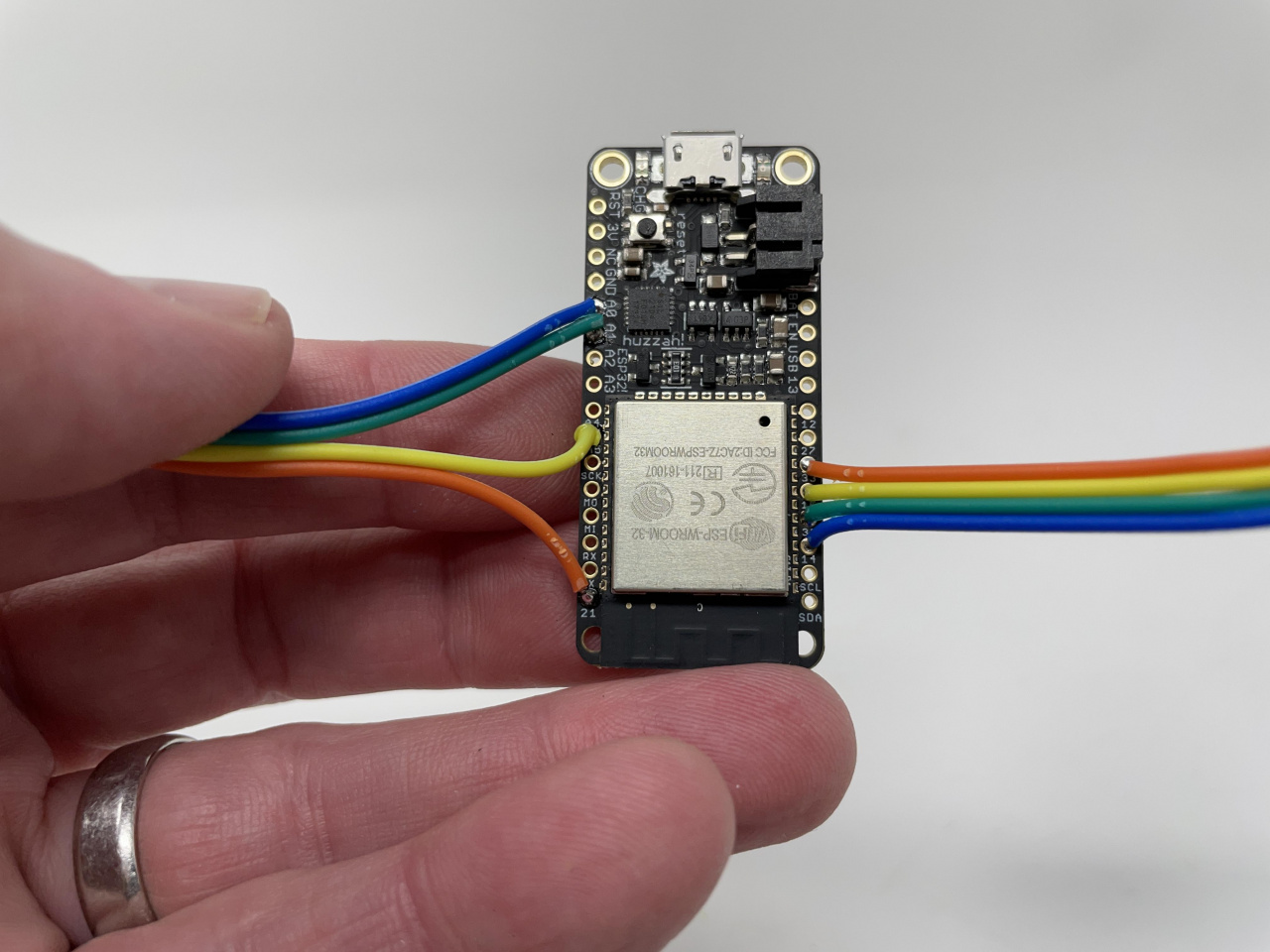
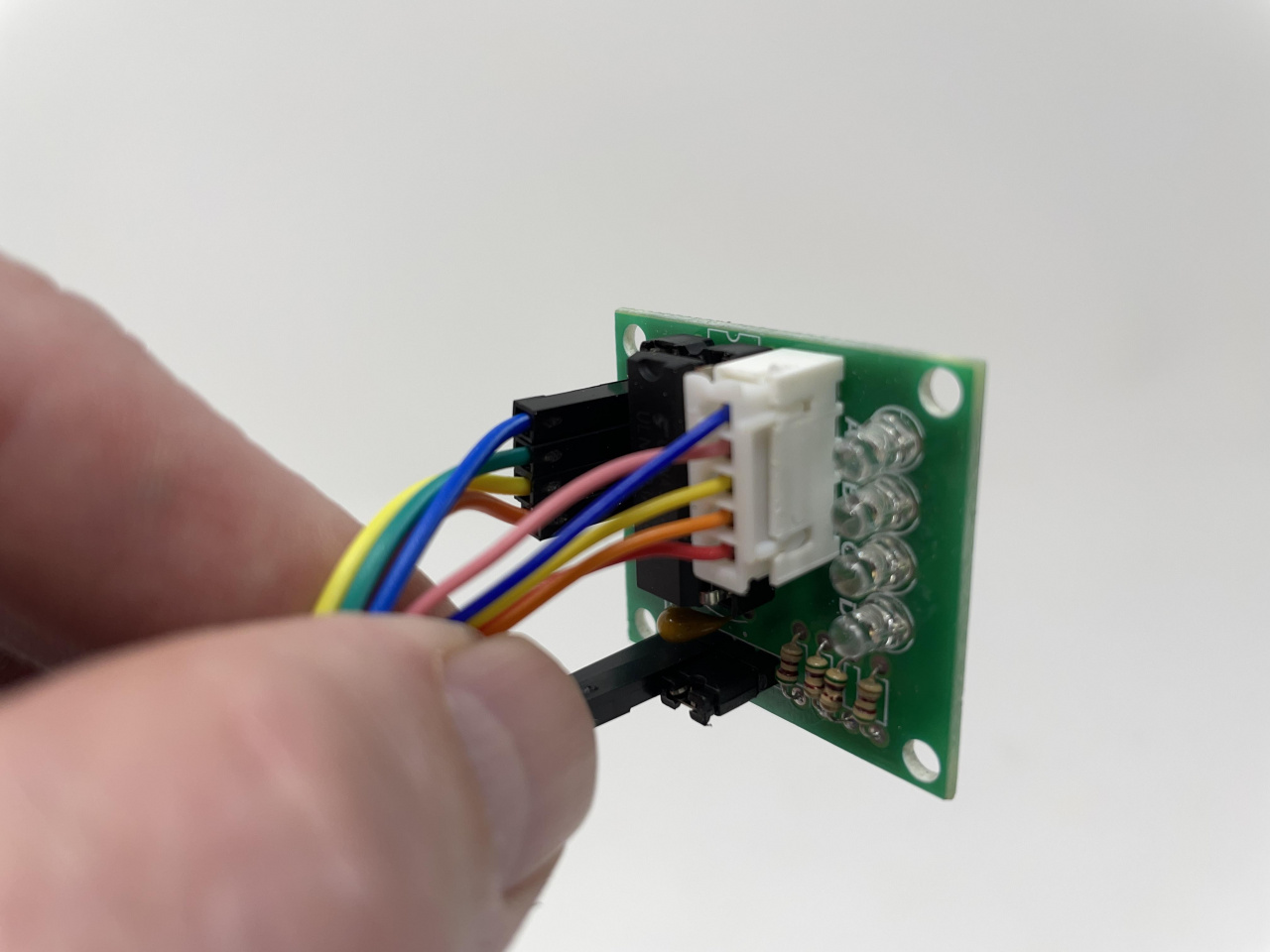
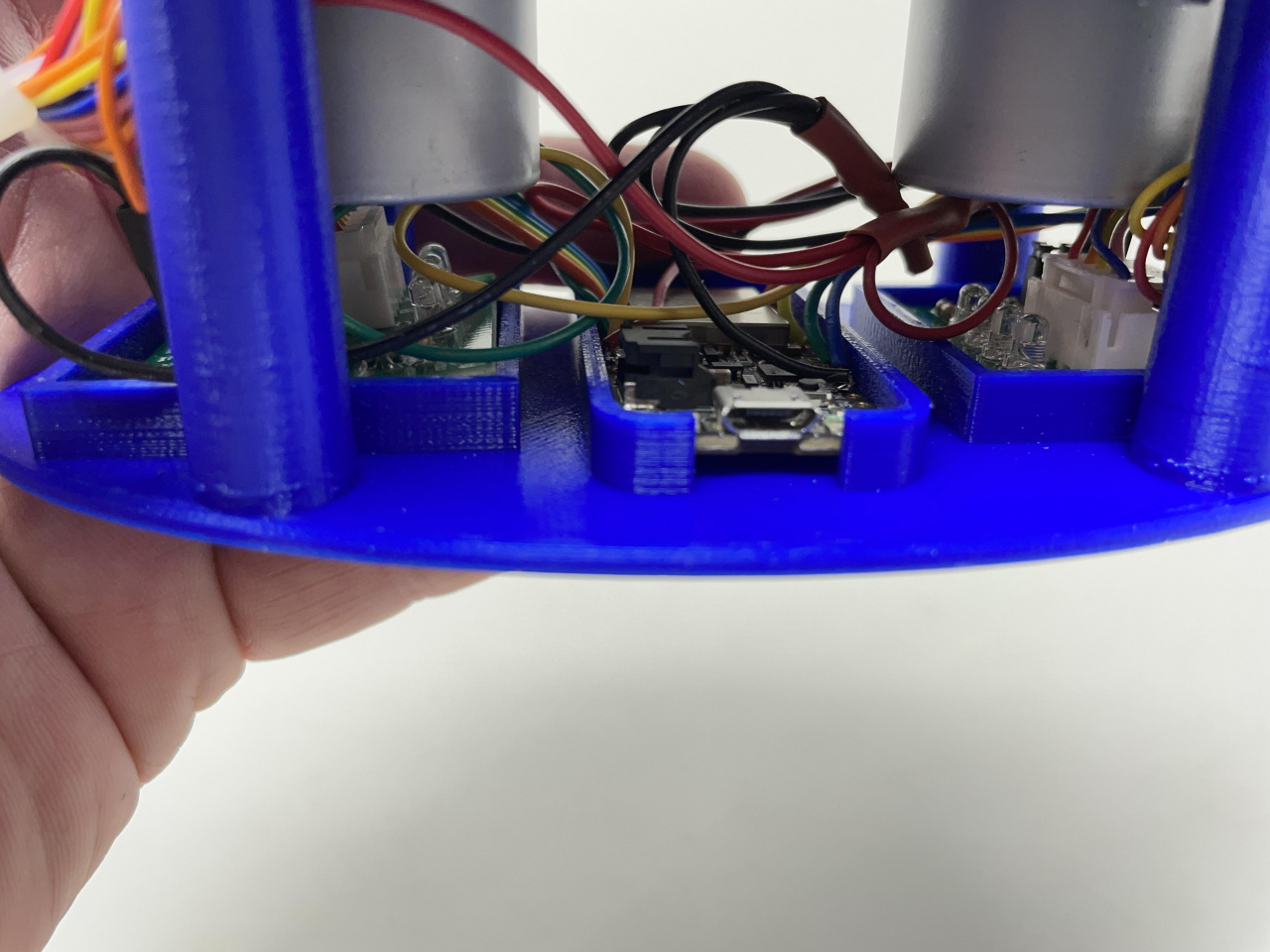
Чтобы подключить ESP32, необходимо выполнить следующие действия:
Чтобы подключить драйвер двигателя Slice01, необходимо выполнить следующие шаги:
Чтобы подключить драйвер двигателя Slice18, я выполнил следующие шаги:
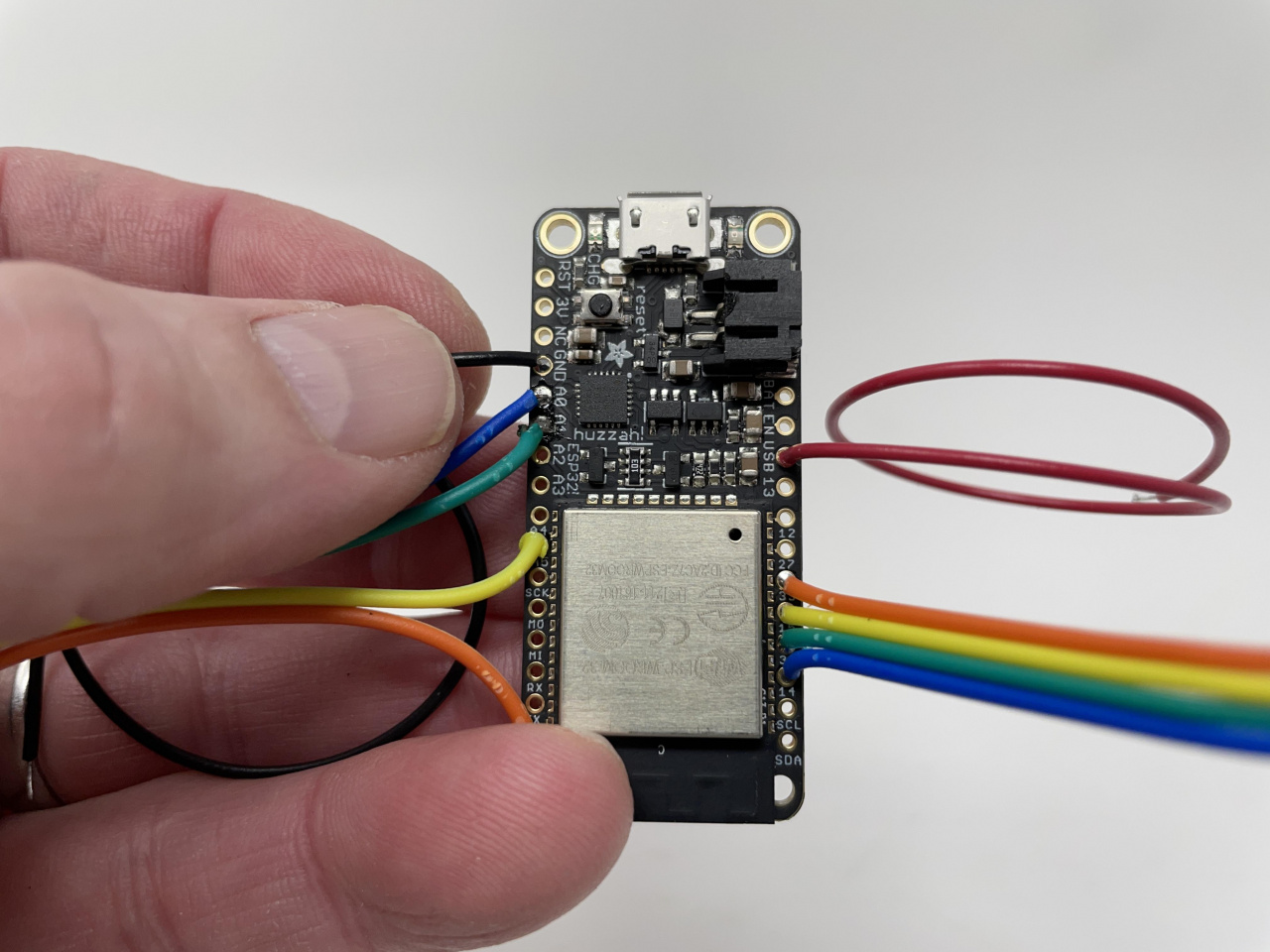
Для завершения разводки я выполнил следующие действия:
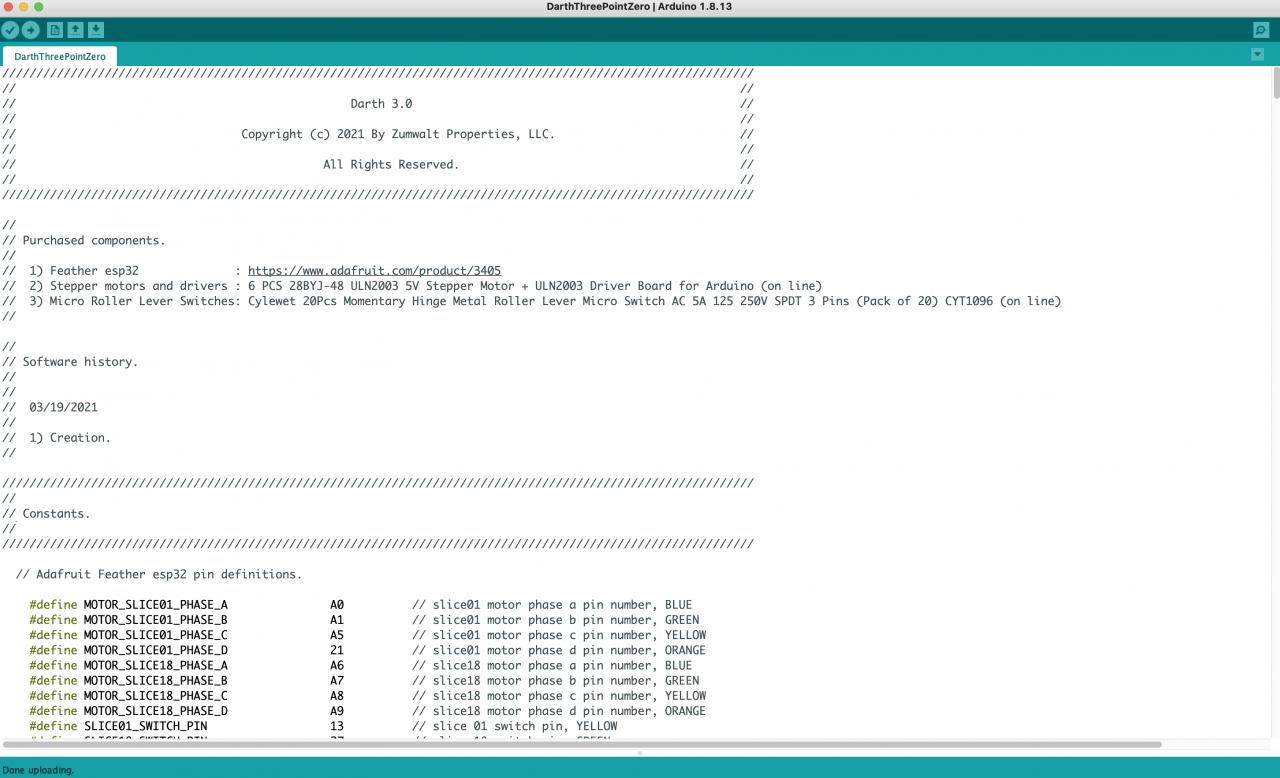
Я написал программу "DarthThreePointZero.ino" для "Darth 3.0: 3D Printed Animated Darth Vader Helmet" в среде Arduino 1.8.13 на MacOS Big Sur. Я разработал программное обеспечение без внешних библиотек в надежде, что его будет проще скомпилировать и загрузить для всех.
Чтобы скомпилировать и загрузить программное обеспечение в ESP32, я подключил USB-кабель между моим компьютером и ESP32, загрузил «DarthThreePointZero.ino» в среду Arduino, затем нажал кнопку со стрелкой вправо, чтобы скомпилировать и загрузить программное обеспечение в ESP32.
Программное обеспечение разделено на несколько разделов, первый из которых - это раздел «Константы», в котором определены номера контактов, режимы и подрежимы таймера программ обслуживания прерываний, команды анимации и параметры шагового двигателя.
Второй раздел «Глобальные переменные» определяет глобальные переменные для прерываний и фрагментов.
Третий раздел «Прерывания» содержит процедуру обслуживания прерывания «onTimer». Эта процедура выполняет все аспекты определения местоположения фрагментов и выполнения пошаговых команд, полученных от функции «loop» Arduino.
Третий раздел «Arduino» содержит стандартные функции настройки и цикла Arduino. В функции настройки создаются назначения выводов, а также устанавливается и создается процедура обслуживания прерывания с семафором для функции цикла Arduino. Функция цикла Arduino предназначена для выполнения массива команд анимации. Она последовательно проходит через массив «AnimationCommands []» и выполняет каждую команду анимации последовательно после завершения предыдущей команды анимации, как определено путем приема семафора из подпрограммы обслуживания прерывания «onTimer».
Последний раздел "Utilities" содержит подпрограммы, предназначенные только для процедуры обслуживания прерываний, включая "MotorSlice01Off()", предназначенную для выключения двигателя Slice01, "MotorSlice01Step", предназначенную для шага двигателя Slice01 на один шаг, "MotorSlice18Off()", предназначенную для выключения двигателя Slice18, и, наконец, "MotorSlice18Step", предназначенную для шага двигателя Slice18 на один шаг.
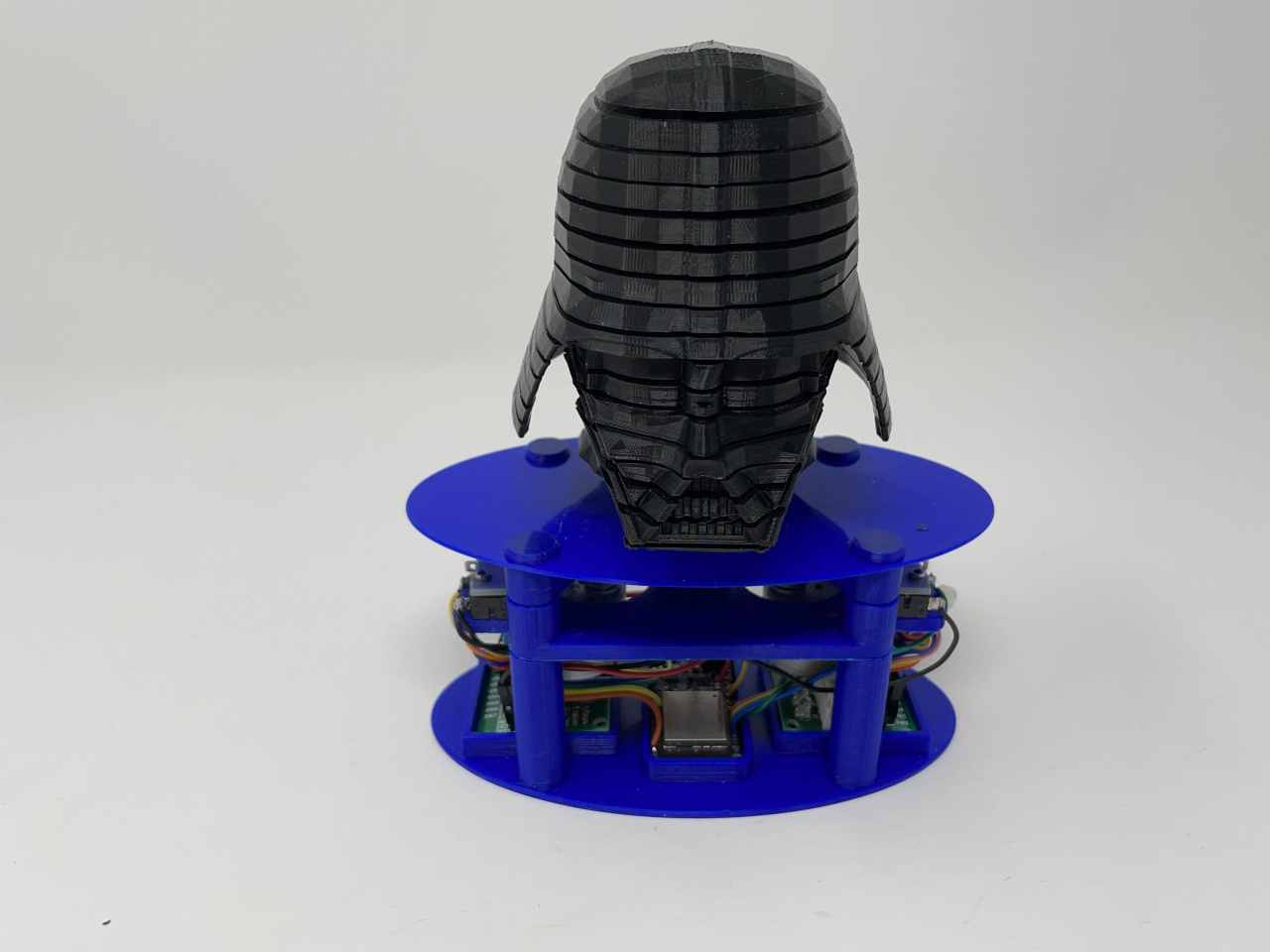

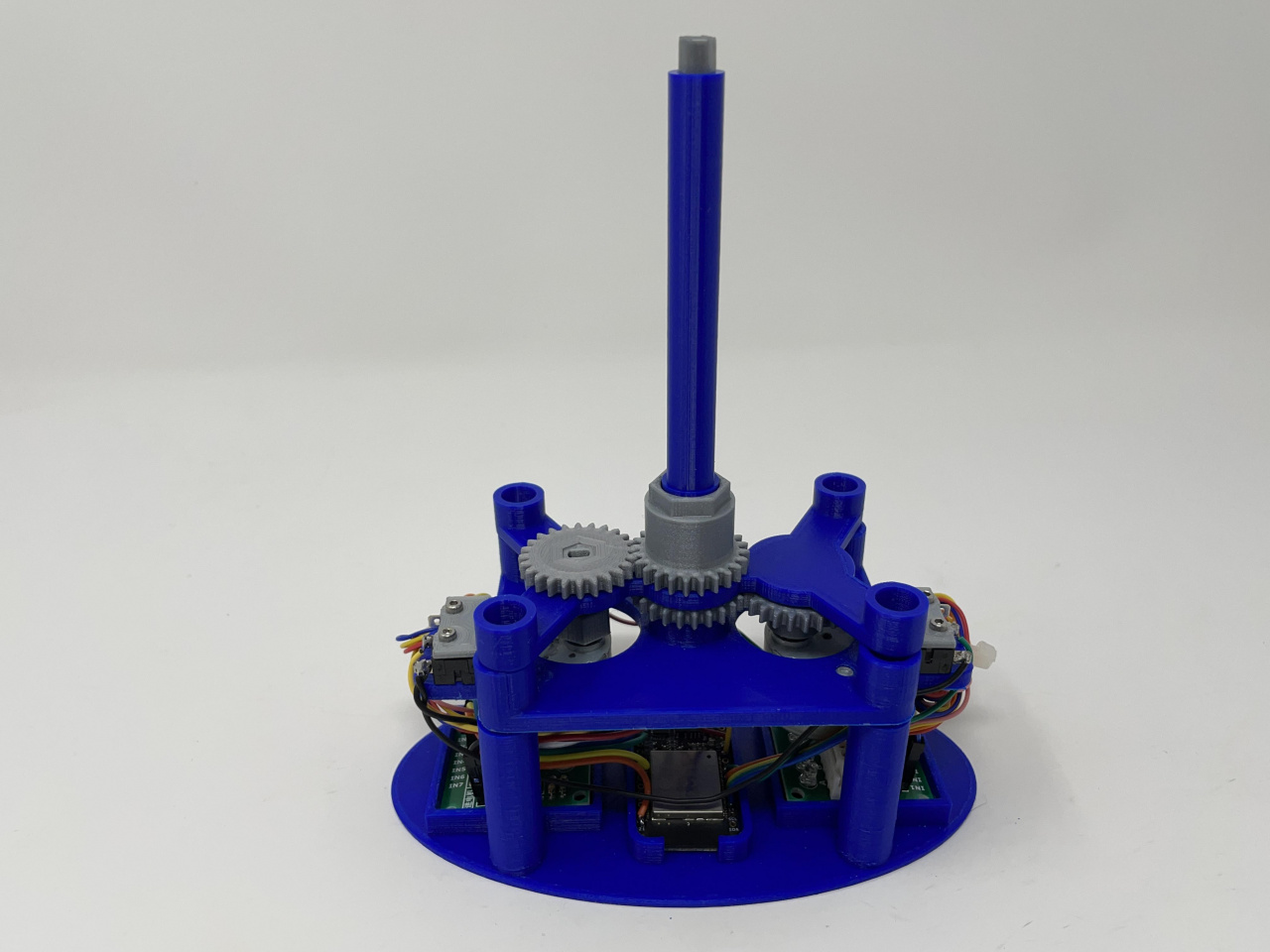
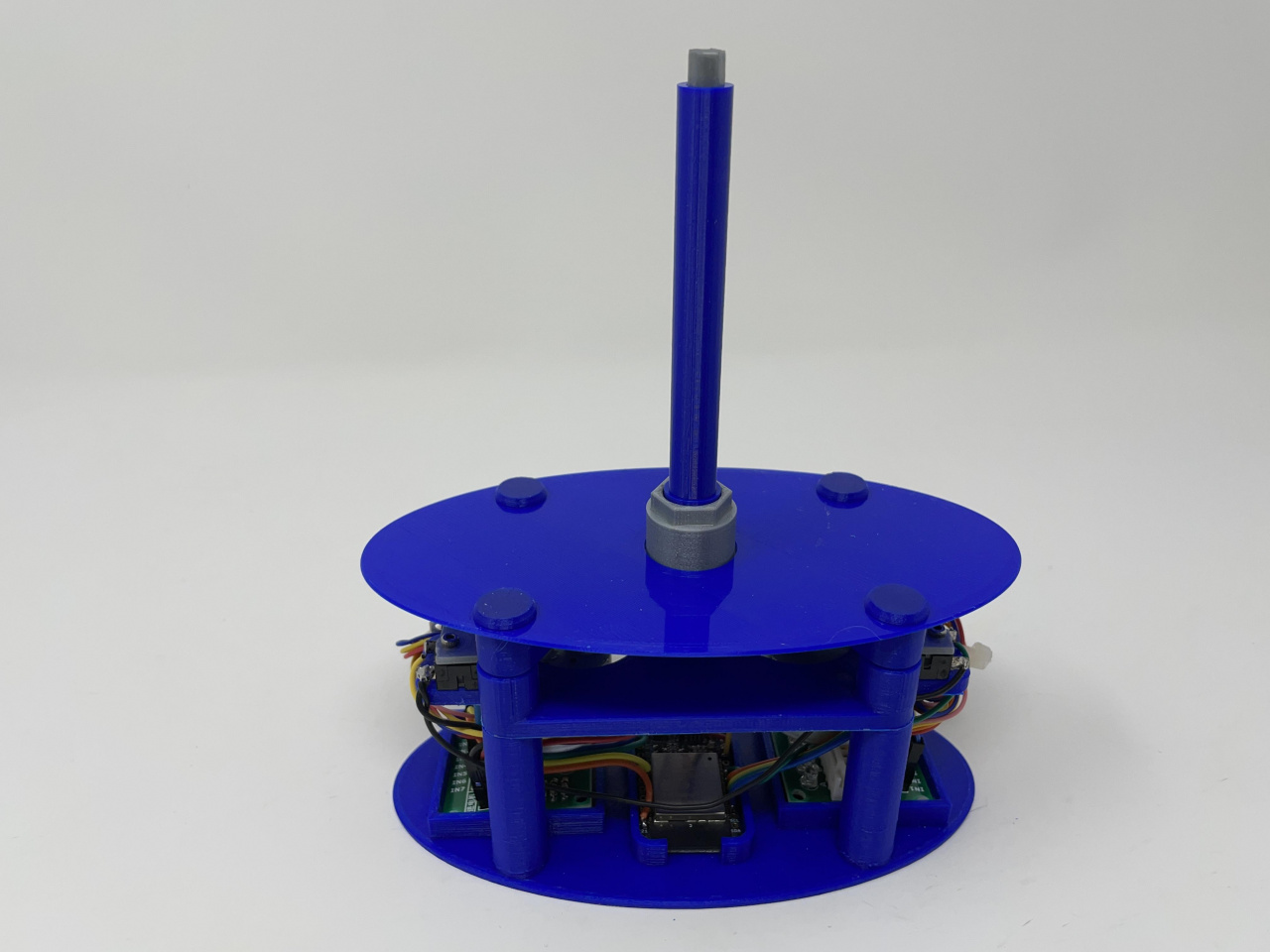
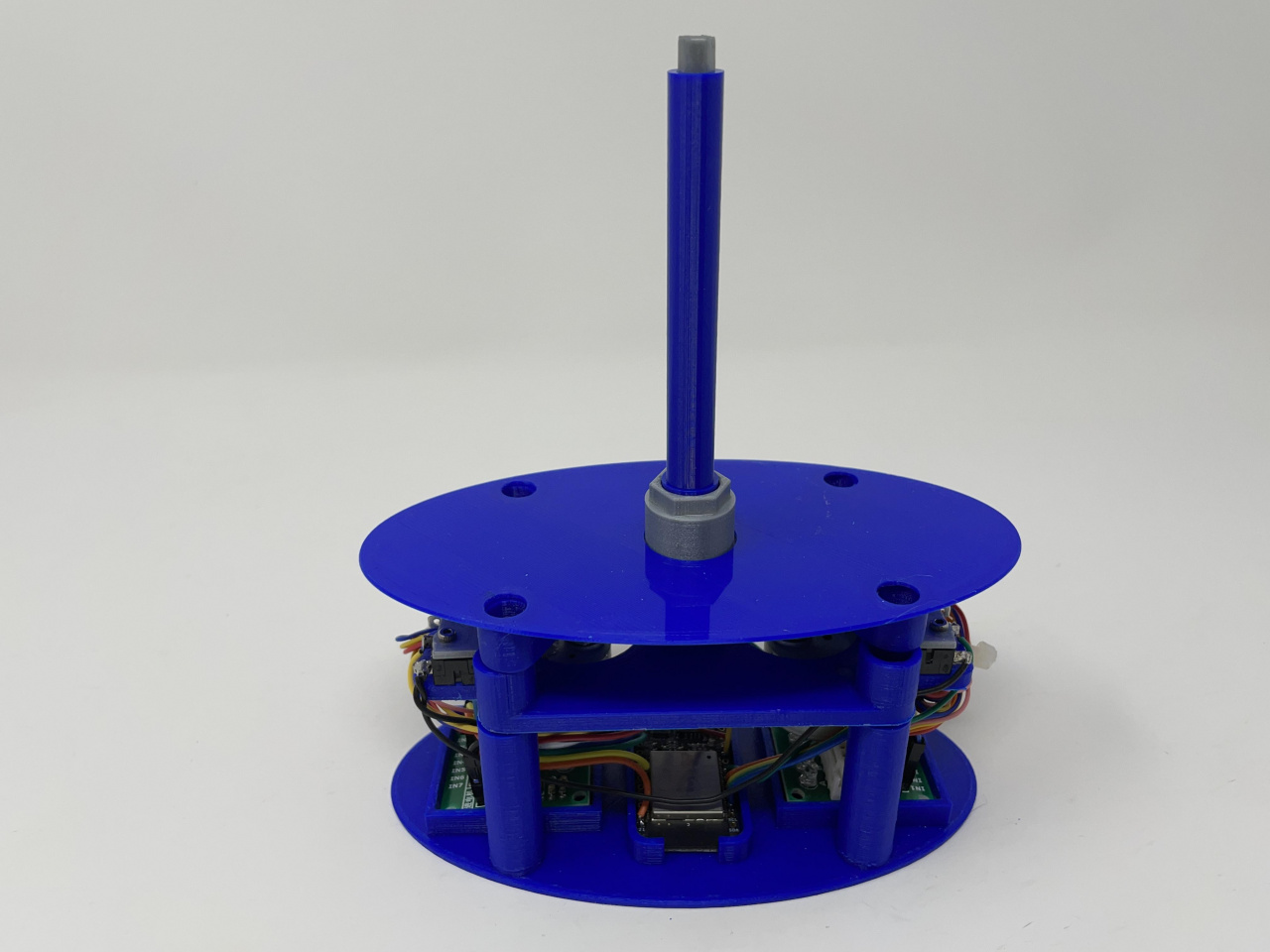
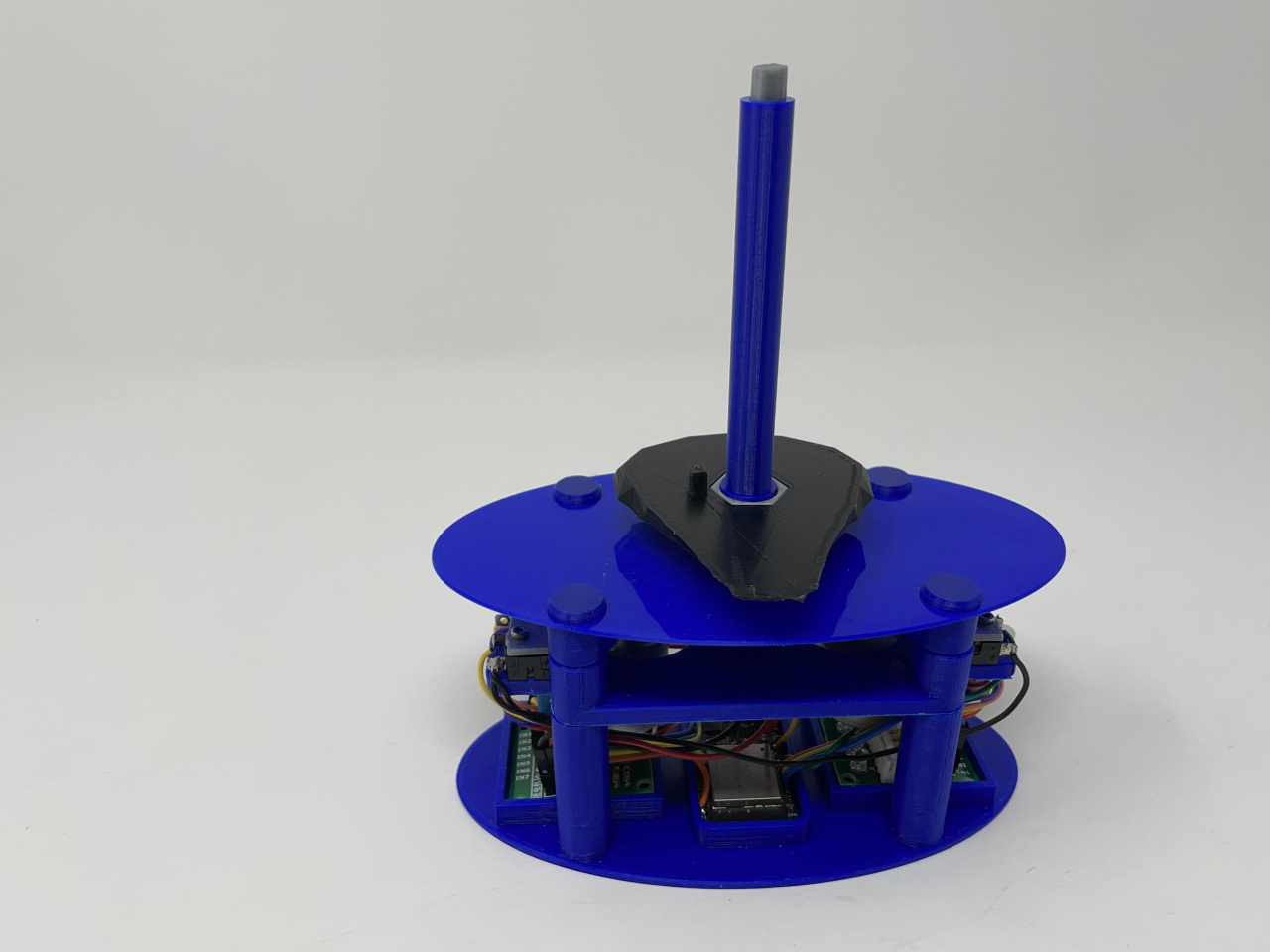
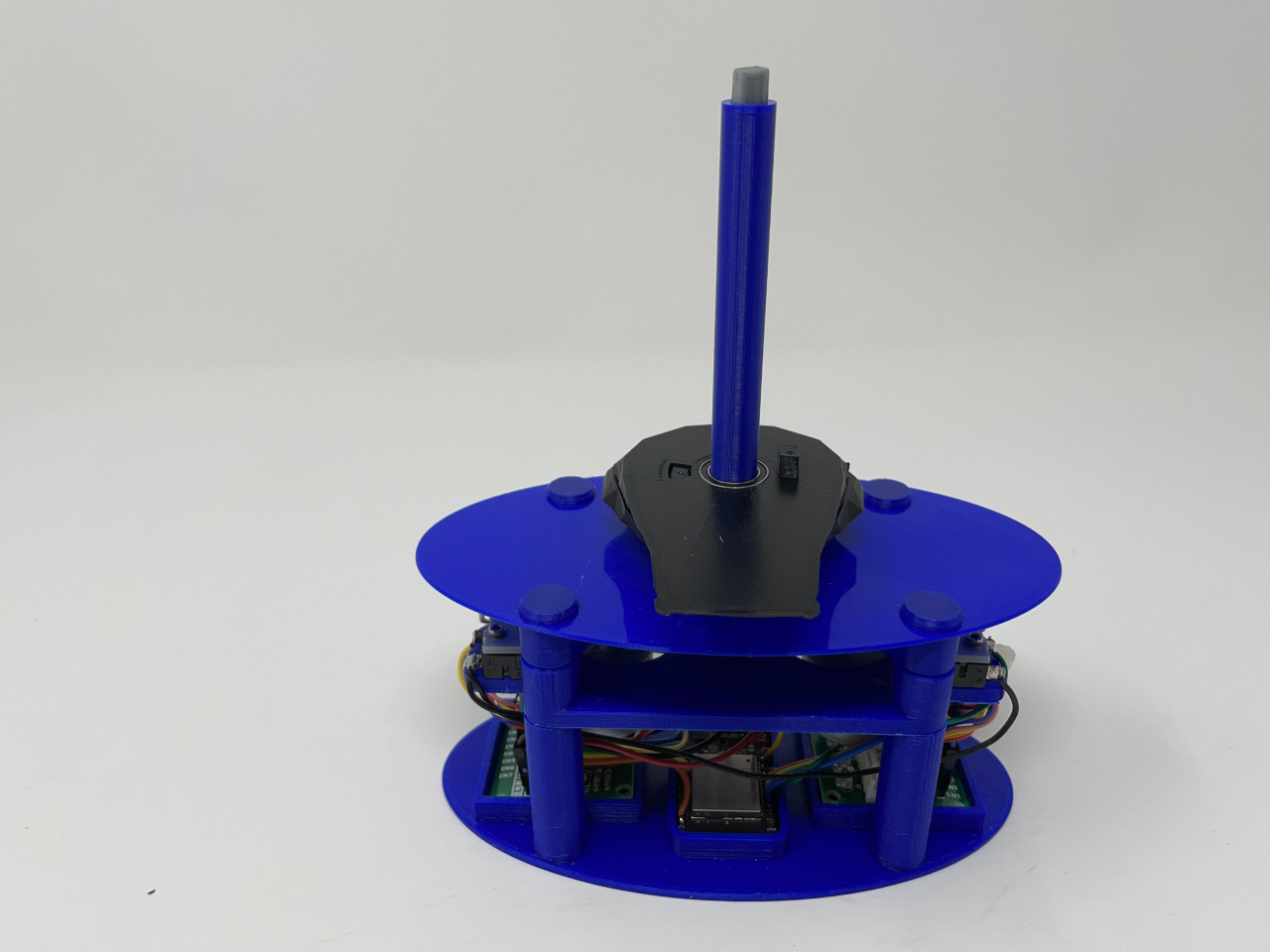
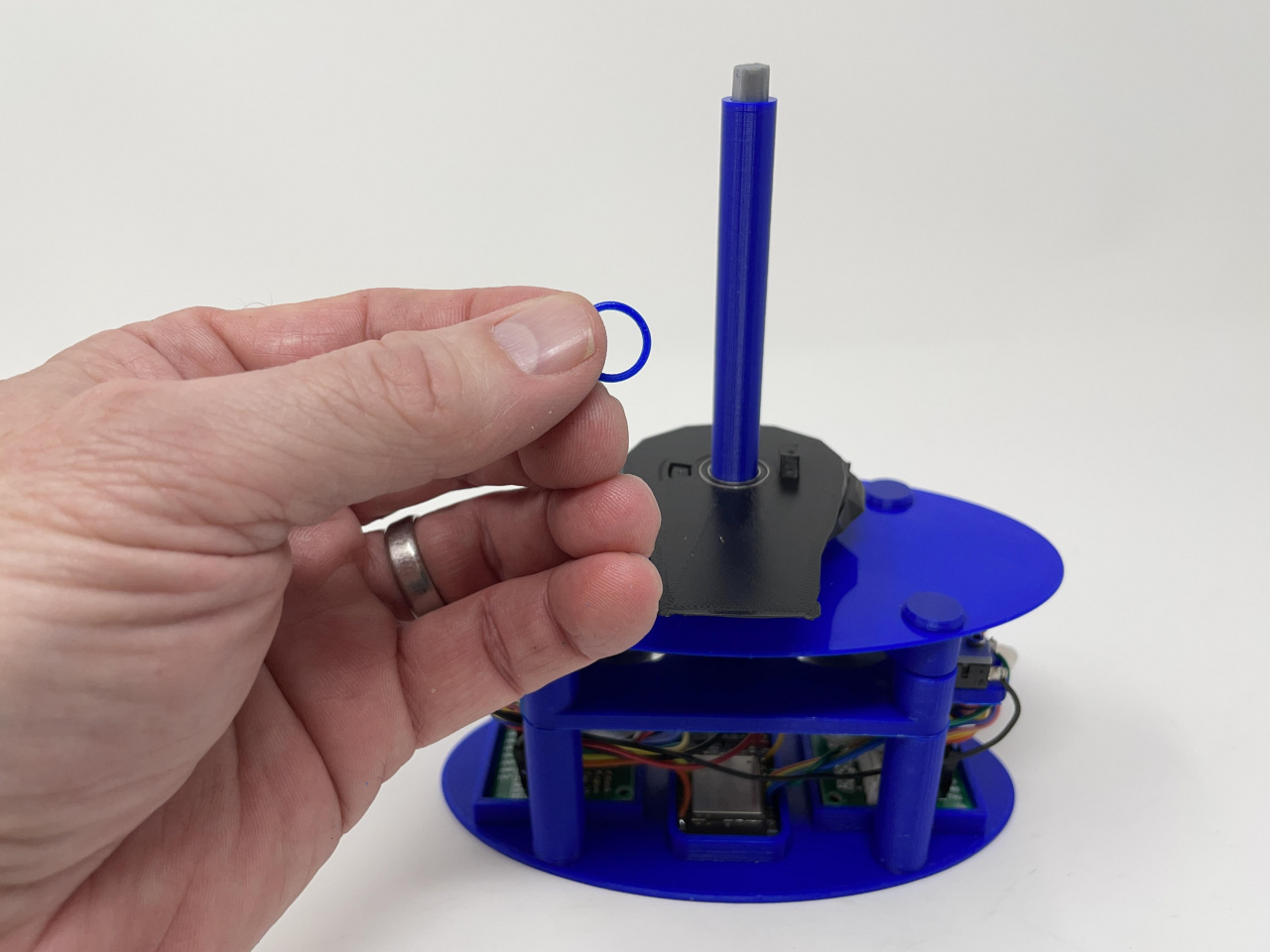
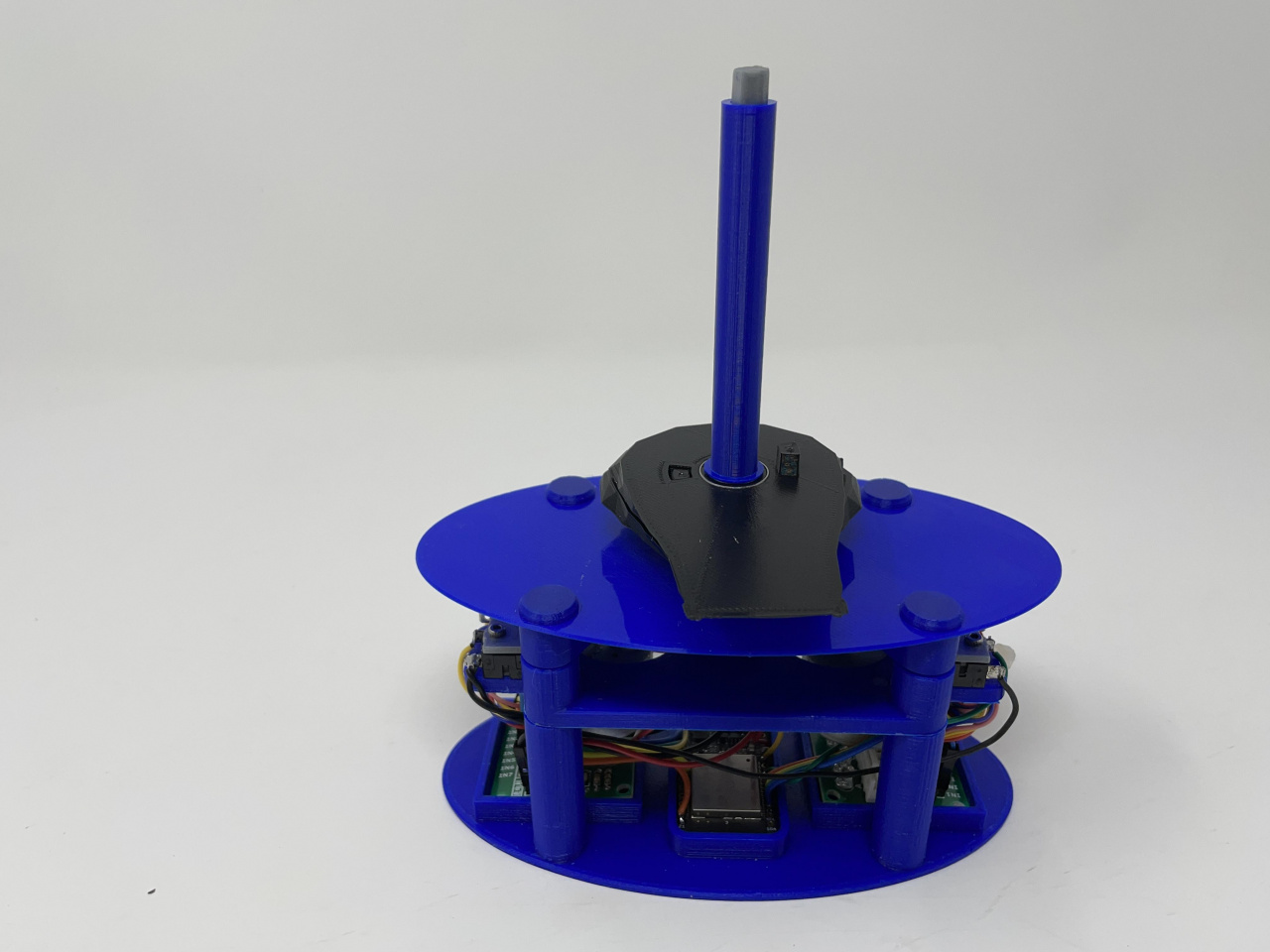
Для окончательной сборки я выполнил следующие действия:
После завершения сборки я подключил USB-кабель к источнику питания ESP32 и USB, подключил источник питания к электросети, и все заработало!
Советуем вам прочитать статьи опубликованные в нашем блоге ранее: «Полное руководство по 3D-печати [часть 1]» и «Подвижная фигурка штурмовика из Звездных Войн на 3D-принтере — файлы для печати прилагаются!».
Если вам понравилась статья, то ставьте лайк, делитесь ею со своими друзьями и оставляйте комментарии!
Отзывы о компании Станкофф Ирина Огромный ассортимент! Это любимый магазин мужа, покупали...
Дробилка для пластика — своими руками! [Чертежи прилагаются] Искандер ОТЛИЧНО СПАСИБО РЕБЯТАМ ЗА ТРУД
Как правильно выбрать смазочно-охлаждающую жидкость? Але Спасибо за статью. И все же что - 430 или 340 лучше...
Снижаем расходы по всем фронтам: новая автоматизированная линия по производству поддонов Алексей Владимирович Да уж. Спасибо
Лазерная очистка металла: принцип, характеристики и применение Антон Здравствуйте! По наличию оборудования и подбору...
Поставка фуговально-рейсмусового станка XSD 310 и ленточнопильного станка RIKON 10-353 в Москву Антон Здравствуйте! Актуальную цену на это оборудование можно...






 Фрезерование на станках с ЧПУ – Подробно про процесс, станки и операции
Фрезерование на станках с ЧПУ – Подробно про процесс, станки и операции 10 лучших систем ЧПУ в мире
10 лучших систем ЧПУ в мире Черные и цветные металлы: различия и области применения
Черные и цветные металлы: различия и области применения Почему латунь, бронза и медь зеленеют?
Почему латунь, бронза и медь зеленеют? Область применения и интересные факты о меди
Область применения и интересные факты о меди![12 методов изготовления изделий из пластика и примеры их использования [Часть 1]](http://www.stankoff.ru/files/blog/5EajrhQ1N1mq4SMdzLrhvVL5YMvbtkJ4cte2ZkwP-sm.jpg) 12 методов изготовления изделий из пластика и примеры их использования [Часть 1]
12 методов изготовления изделий из пластика и примеры их использования [Часть 1] Лазерная очистка металла: принцип, характеристики и применение
Лазерная очистка металла: принцип, характеристики и применение Виды лазеров: 4 метода классификации
Виды лазеров: 4 метода классификации![Различные виды литья металлов преимущества и недостатки [Часть 1]](http://www.stankoff.ru/files/blog/qc7Dq4L4qo134CGGvQjiCfGdKsJDrGmMj9wYlh2m-sm.webp) Различные виды литья металлов преимущества и недостатки [Часть 1]
Различные виды литья металлов преимущества и недостатки [Часть 1] Муфты — назначения, типы и факторы выбора
Муфты — назначения, типы и факторы выбора![Что такое отжиг? [7 видов процесса отжига]](http://www.stankoff.ru/files/blog/ItTTmsvBPNripAYsLPzmFCiuSBuoWIRR5FN1TAzS-sm.jpg) Что такое отжиг? [7 видов процесса отжига]
Что такое отжиг? [7 видов процесса отжига] 40 интересных фактов о металлах
40 интересных фактов о металлах 18 различных типов металла — факты и применение
18 различных типов металла — факты и применение Что такое термическая обработка металлов? Методы и преимущества
Что такое термическая обработка металлов? Методы и преимущества![Что такое нержавеющая сталь? [ Часть 2]](http://www.stankoff.ru/files/blog/9gKffNBxwZfKX8xu4XZnh74u77oMWzXw6NreGjCy-sm.jpg) Что такое нержавеющая сталь? [ Часть 2]
Что такое нержавеющая сталь? [ Часть 2]![Гибка листового металла - методы и советы по проектированию [часть 1]](http://www.stankoff.ru/files/blog/GO1VKbFFRkZ2mP57FYJnZACDplzbp67kVwrumTJf-sm.jpg) Гибка листового металла - методы и советы по проектированию [часть 1]
Гибка листового металла - методы и советы по проектированию [часть 1] Почему каждый инженер должен использовать САПР?
Почему каждый инженер должен использовать САПР? Токарная обработка с ЧПУ - процессы, операции и оборудование часть 2
Токарная обработка с ЧПУ - процессы, операции и оборудование часть 2 Как работает плазменная резка? Преимущества и недостатки
Как работает плазменная резка? Преимущества и недостатки Как собрать самодельный фрезерный станок с ЧПУ + Чертежи и схемы!
Как собрать самодельный фрезерный станок с ЧПУ + Чертежи и схемы!